仿生蜘蛛機器人的設計與實現

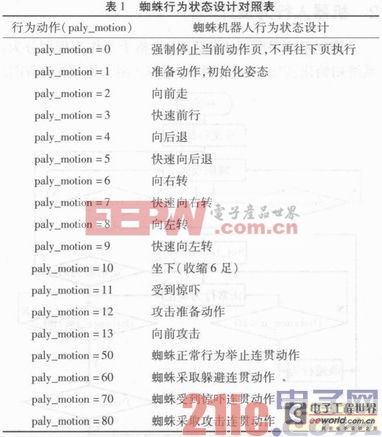
動作初始化部分相對較簡單,但要建立在伺服器初始化之后,方能進行。原理上是將每個伺服器旋轉角度調整到一定的位置上,使之呈現一個定型姿態,作為機器人的待機動作。通過改變整個系統結構的全局變量play_motion來完成動作初始化,表1對該參數進行了對照解說,再調用Load函數執行該動作頁面來實現功能。
2.2 啟動模式
2.2.1 睡眠模式
當機器人電源開關開啟,進行初始化之后,蜘蛛機器人進入睡眠狀態。設計對睡眠模式的定義為:令機器人處于一個靜止姿勢,不做任何行為,等待被啟動。這里設定一個無限循環,當判斷收到喚醒命令時,跳出循環,開啟定時器,執行正常行為舉止后,通過定時器的超時機制,回到睡眠模式。定時器時間值的量化級為:輸入的值每0.125 s減1,即當定時器設置為8,便是1 s,具體實現中設置定時器為240,即30 s的正常行為活動后回到睡眠模式。
2.2.2 聲音啟動
在睡眠狀態中,采用兩種不同的方式:無線遙控模式和聲音啟動模式。對于聲音啟動模式,設定一個閾值,若采集的數據超過閾值時,則開始正常行為活動。閾值的選擇根據傳感器AX-S1對聲音自定義的一個數量級,當周圍沒有聲音輸出約為128的數值,聲音越大數值越接近255,聲音大小每秒輸入約為3 800次。當檢測到像掌聲一樣一定大小以上的聲音時計一次數,為避免把一次擊掌誤認為多次,在一次計數后,采用延時方式,約為80μs后繼續計數。
2.3 生物行為
正常行為舉止:蜘蛛機器人的生物行為即自行通過傳感器采集數據,對數據進行判斷,然后進行處理的一個仿生過程。設計過程將該生物行為定義為正常行為舉止,即正常模式。該模式下,主要研究的是蜘蛛機器人對障礙物的判斷,通過AX-S1采集到的distance_u和distance _f兩個參數進行分析。當上方障礙物所測距離distance_u≤20時,即認為感應到上方有障礙物,蜘蛛則產生坐下的動作。當前方障礙物所測距離distance_f≤100時,再次檢測一下距離是否distance_f≤20,如果20,則退后,向左轉,回到正常模式;如果>20,則采取攻擊,攻擊結束后,回到正常模式。值得注意的是,distance_u與distance_f所采集數據也不是實際的距離,也是通過量化后的數值。
3 結束語
在自然界中,蜘蛛因其獨特的爬行機制可以在垂直的墻壁甚至倒立在天花板上行走。運用仿生學原理設計制作的6足蜘蛛仿生機器人系統,可以完成行走、轉彎、攻擊、趴下等系列動作,并且具有較好的人機交互功能,使蜘蛛機器人達到了仿生的效果,為進一步研究蜘蛛機器人在危險環境中或艱難路況中作業提供了一個基礎測試平臺和設計方案。

伺服電機相關文章:伺服電機工作原理



評論