仿生蜘蛛機器人的設計與實現

1.3 感覺器官設計
設計蜘蛛機器人的感官系統時,如果每個感官對應一個傳感器模塊,那么對蜘蛛機器人關節活動便會增加許多牽絆與阻礙。于是,設計采用1個集超聲測距傳感器、聲音檢測傳感器、亮度傳感器、溫度傳感器和紅外線接收器于一身的Robotis公司的DynamixelAX-S1模塊來充當機器人的感官系統。并且AX-S1與AX-12+機器人專用伺服電機在通信方式上一致,以便于通信和控制器統一管理;在機械上結構相同,外觀上也可以達到統一、美觀。
1.4 本體結構
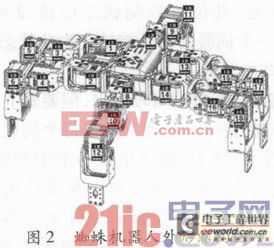
根據生物蜘蛛外形,設計總體結構為:以控制器作為身體部位,連接6足,將傳感器模塊作為頭部。選取合適的連接件,最終拼裝連接得到小型仿生蜘蛛機器人樣機,如圖2所示。
2 機器人行為設計
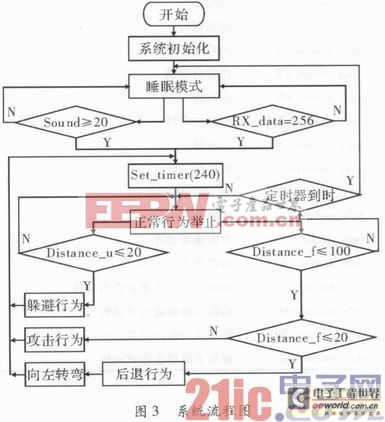
控制系統采用模塊化設計,將整個工作流程劃分為:系統初始化、啟動模式、生物行為等。圖3是系統流程圖。
2.1 系統初始化
機器人的初始化需要做兩部分工作,一是初始化每個伺服器的功能模式,并將每個伺服器切換到位置控制狀態;二是初始化機器人的初始動作,也就是初始狀態,將機器人復位。
2.1.1 伺服器初始化
初始化伺服器的功能模式是因為AX-12+具有多種功能,如果沒有將其初始化,它將記憶之前的設置,按照之前的設置模式完成此次控制,則AX-12+不會正確工作。AX-12+的每個功能對應地址[ADDRESS]的固有號碼,可以通過選擇地址的方法來控制各個功能。例如:要設定AX-12+的位置控制狀態,首先要選定所要設置伺服器的ID。ID=1的伺服器,令address=8,則進入其運轉模式更改,設置mode變量,mode只有兩種狀態:mode=0是無線旋轉模式,mode=1 023是正常位置控制狀態。此處設計所用的18個伺服器被用作蜘蛛機器人的6足,其位置控制狀態應該設置為mode=1 023,且每一個伺服器都要初始化為此狀態。

伺服電機相關文章:伺服電機工作原理



評論