軟件定義汽車:架構趨勢和行業全景

軟件定義汽車的整體架構可以分為四個層次:
(1) 硬件平臺,異構分布式硬件架構;
(2) 系統軟件層,包括 hypervisor、系統內核、POSIX、AUTOSAR 等;
(3) 應用中間件和開發框架,包括功能軟件、SOA 等;
(4)應用軟件層,包括智能座艙HMI、ADAS/AD算法、連接算法、云平臺等。
廣義上講,作系統是指基于內核作系統的中間件,包括系統軟件層(內核、管理程序、中間件)、功能軟件層(常用功能模塊和相關中間件)和 API。狹義上講,作系統主要是指位于系統內核底層的 Vehicle Control OS 和 Automotive OS。
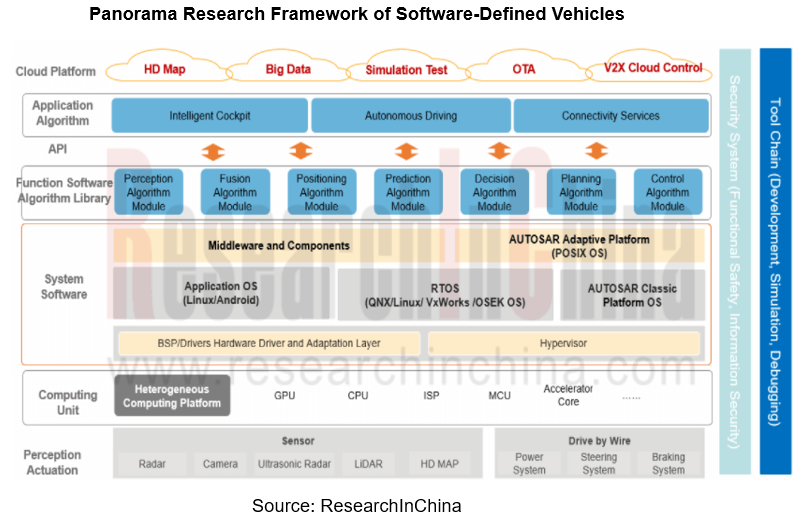
狹義的作系統是構建智能網聯汽車的基石,而廣義的作系統是應用開發的橋梁
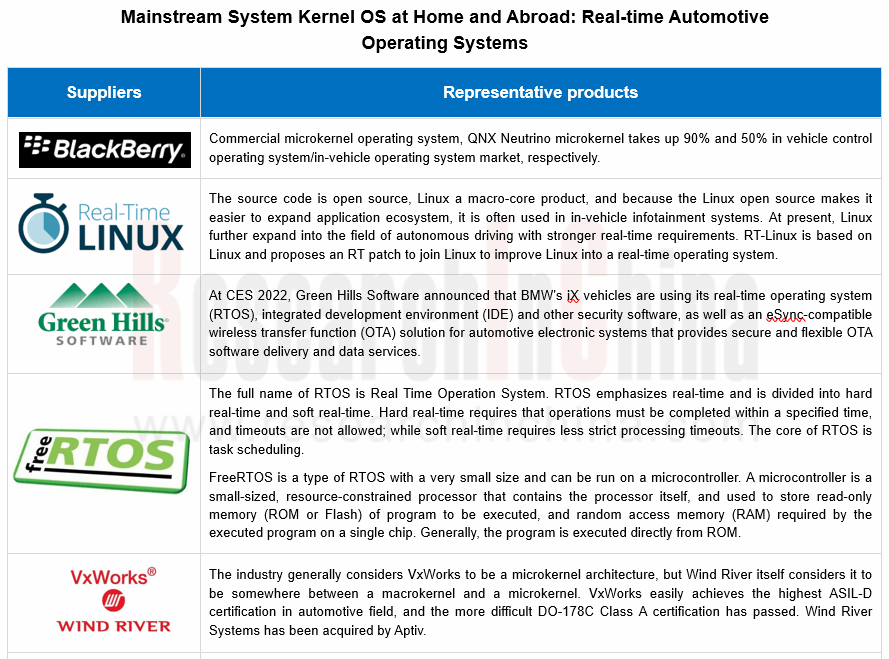
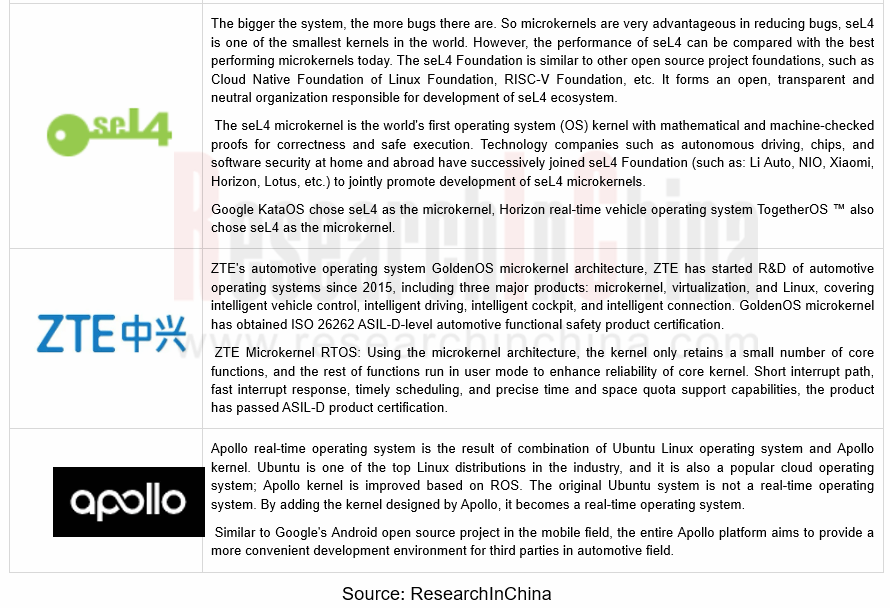
Microkernel,只需要實現基本的任務管理、內存管理、進程通信等,其他驅動都在用戶端定義來實現,目前常用的智能駕駛作系統主要有Linux、QNX等RTOS(如free RTOS、VxWorks等)。基于第三代微內核技術的開源微內核 seL4 越來越受到國內汽車制造商和科技公司的關注。理想汽車、蔚來汽車、路特斯汽車、地平線機器人、小米等科技公司紛紛加入 seL4 基金會,共同推動 seL4 微內核的發展。
智能汽車的發展仍然面臨“缺芯片”和“缺汽車作系統”的困境。前者已經受到了足夠的關注,而后者仍需突破。目前,國外供應商 QNX (Blackberry)、Linux (開源) 和 Android (Google) 是狹義汽車作系統的核心參與者。例如,在智能座艙系統方面,QNX+Android 的結合是國內廠商選擇的主流方案。總部位于中國的華為 HarmonyOS 和 Powered by AliOS 取得了一定的突破,但它們的自給率仍然很低。在智能駕駛系統領域,QNX 占據絕對壟斷地位。
在自主可控的背景下,實時汽車作系統為填補汽車作系統空白指明了重要的發展方向。包括華為、中興、百度 Apollo 和斑馬智能驅動器在內的許多國內科技公司都在尋求實時微內核作系統領域的突破。
廣義上講,作系統是開發者促進應用算法開發的橋梁,是包括狹義作系統、中間件等在內的開發平臺。
我們將廣義的作系統分為幾類:
用于自動駕駛的通用作系統
智能座艙通用作系統
車云一體化通用作系統
典型的自動駕駛通用作系統包括 iSoft Infrastructure Software 的 AUTOSAR CP 和 AP 集成解決方案、百度 Apollo AI 開源平臺、Autoware ROS2.0 開源平臺、華為 AOS、TTTech MotionWise、Enjoy Move Technology 的 EMOS、AICC 的 ICVOS、ZF Middleware 等。
iSoft Infrastructure Software 基于 AUTOSAR CP 的量產,為安全域和高性能計算域提供 AUTOSAR CP+AP 集成解決方案。借助其云系統,它實現了智能連接。iSoft Infrastructure Software 的集成解決方案可應用于智能座艙領域、車輛控制系統領域和 ADAS/AD 領域。通過標準化不同作系統、底層硬件和協議軟件的接口和架構,它構建了面向服務的軟件架構。在智能座艙域和 ADAS/AD 域,iSoft Infrastructure Software 正在開發相應的作系統內核,以全面布局汽車基礎軟件平臺。
此外,自動駕駛 SoC 芯片廠商并不滿足于僅僅提供硬件,而且還在自動駕駛生態系統中尋求分一杯羹,以增加進入門檻。英偉達(Nvidia)推出了用于自動駕駛的DriveWorks開源平臺,地平線機器人(Horizon Robotics)推出了TogetherOS?,這是一個具有安全微內核架構的實時汽車作系統。
整車廠也不甘示弱,正在考慮開發自己的自動駕駛作系統,尤其是第一批新興汽車制造商利用 AUTOSAR Classic Platform +DDS 構建自動駕駛作系統(開發平臺)。隨著技術生態的不斷成熟,轉型中的新興整車廠和整車廠正在努力自行開發自動駕駛作系統。
-Tesla.OS(版本)是特斯拉自己基于底層 Linux 開發的。在功能軟件方面,它支持深度學習編程框架 PyTorch。
-大眾。作系統基于 Linux+AUTOSAR Adaptive,具有軟件和 I/O 功能以及 SOA 的解耦功能。
-豐田的 Woven Planet Group 正在將 Apex.OS SDK 集成到其自己的車輛開發平臺 Arene 中。Apex SDK 將處理安全關鍵型應用程序,旨在加快自動駕駛軟件開發并最終將其引入量產車輛。
-理想汽車正在開發自己的 Li OS,并計劃打造跨域智能作系統平臺。Li OS 以自動駕駛為目標,未來將與智能車輛控制和智能座艙連接。
在汽車中間件(AUTOSAR、ROS2、Cyber RT)方面,不同的自動駕駛作系統供應商有不同的選擇。例如,百度 Apollo 使用自主開發的 CyberRT,Autoware 采用 ROS2,其他供應商歡迎 AUTOSAR Classic 和 AUTOSAR Adaptive。近年來,Apex.AI OS(與 ROS 2 API 兼容)得到了一些歐洲 OEM 和 Tier1 供應商的廣泛支持。Apex.AI 已被大陸集團、豐田、采埃孚、捷豹路虎、沃爾沃、海拉和戴姆勒卡車等眾多汽車行業的領先企業投資。
在自動駕駛領域,中間件的功能涉及通信、模塊升級、任務調度和驅動管理,但其主要功能在于通信。通信中間件(DDS、SOME/IP、MQTT)的引入可以幫助開發人員提高效率。目前,通信中間件主要包括 SOME/IP、DDS 和 MQTT。目前,SOME/IP 和 DDS 是自動駕駛中應用最廣泛的兩種通信中間件。
SOME/IP通信中間件
SOME/IP中間件提供商包括AUTOSAR工具鏈供應商,如Vector、ETAS、EB等國外公司,以及以iSoft基礎設施軟件、經緯海潤科技等為代表的國內公司。GENIVI 聯盟提供 SOME/IP 的開源版本。
DDS 通信中間件
商業閉源通信中間件主要以 RTI Connext DDS 為代表,占據了 80% 以上的市場份額。小鵬汽車是中國第一家將 Connext DDS 應用于自動駕駛汽車的企業。HoloSAR 是 HoloMatic Technology 的自動駕駛中間件,也集成了 RTI Connext DDS。
其他開源通信中間件包括 OPEN DDS、FAST DDS、Cyclone DDS 等。近年來,涌現出許多通信中間件產品,包括博世 ETAS 的 iceoryx、Greenstone 的 Swift 和 MotionWise Cyclone DDS。此外,新版 AUTOSAR Adaptive 在通信管理方面加強了 DDS,iSoft Infrastructure Software 開發的 AP 產品支持第三方 DDS 的集成。
MQTT 通信中間件
可用于低帶寬、不可靠的網絡場景,基于物聯網通信協議 MQTT 的云平臺提供遠程設備的數據傳輸和監控。
自動駕駛工具鏈軟件正在成為一個競技場
自動駕駛系統由感知、規劃和決策組成。算法研發的關鍵主要在于數據采集、感知模型訓練、仿真測試和實車測試等。感知和規劃構成了數據生成的主要部分,包括數據收集、數據清洗和數據標注。
通過一系列工具鏈,形成完整的自動駕駛全鏈條數據閉環開發流程,具有全閉環和自我成長的特點。這給主要 OEM 和 Tier1 供應商在開發自動駕駛系統時構成了重要的技術障礙。涉及的軟件和數據服務包括:
AI 深度神經網絡學習軟件
涉及的軟件/框架主要包括 TensorFlow/ PyTorch/ OpenCV/ TensorRT 等。在中國,百度已經推出了 Paddle Paddle,華為也發布了 MindSpore。
Transformer 神經網絡模型可以較好地實現時空維度的建模,并已大規模應用于生產自動駕駛汽車:
Transformer 是特斯拉 FSD 系統算法中的核心模塊之一。提取圖像特征后,結合 Transformer、CNN 和 3D 卷積等 AI 神經網絡算法,完成跨時間圖像融合,從而在 2D 圖像形成的基礎上輸出 3D 信息。
在國內,Haomo.AI 提出了將 Transformer 與海量數據進行有效集成。Haomo.AI 的 MANA 數據智能系統采用 Transformer 在底層融合視覺和 LiDAR 數據,進而實現對空間、時間和傳感器的深度感知。
小鵬 G9 部署了 Transformer:經過不斷優化,動態 XNet 所需的 122% 的 Orin-X 算力現在已經降低到 9%。
自動駕駛數據采集與自動標注系統
根據 IDC 的數據,到 2025 年,中國人工智能數據采集與標注服務的市場規模將達到 123.4 億元,主要由自動駕駛汽車的數據采集和標注驅動。因此,對數據收集、處理、存儲、訓練軟件和工具的需求很大。
Xnet 是小鵬汽車的“下一代感知架構”,當它與車內所有傳感器相結合時,可以實時生成“高清地圖”。通過動態 XNet,可以更準確地識別動態對象的速度和意圖。XNet 需要大量的數據收集、注釋、訓練和部署。小鵬自主研發了自動標注系統。
但是,許多其他汽車制造商可能會與合作伙伴合作進行數據收集和注釋。典型供應商包括 Speechocean(全球 AI 訓練數據服務提供商)、華為章魚(數據采集、訓練和模擬服務)、Vector(CANape,數據采集工具)、澳鵬中國(AI 數據收集和標注服務)、ExceedData(數據采集和標注平臺)等。
自動駕駛訓練數據集
對于以深度學習為主要方法的自動駕駛,訓練數據集是最關鍵的。算法是相似的(特別是,其中許多是開源的),因此無法判斷哪個是最好的。深度學習數據集與最終結果相關,因此前者起著決定性的作用。訓練數據集的覆蓋面越廣,標注越精細,分類越準確,類型越多,最終的自動駕駛性能越好。
許多自動駕駛公司,包括大眾-福特合資企業 Argo 的 Argoverse、Waymo 的 Open、百度的 ApolloScape、英偉達 (PilotNet)、本田 (H3D)、安波福 (nuScense) 都披露了他們的一些訓練驗證數據集,一些提供了開源下載鏈接。現在最有影響力的是 KITTI、Waymo Open 和 Aptiv nuScenes。
國內具有地方特色的數據集較少,主要包括華為“ONCE”、車路協同自動駕駛數據集“DAIR-V2X”、金橋“JICD”數據集、廈門大學和上海交通大學聯合發布的大規模駕駛行為數據集DBNet、習安交通大學和長安大學聯合構建并披露的DADA數據集。
自動駕駛數據存儲與計算中心(云服務)
數據存儲與管理僅體現云服務的基本能力。汽車制造商對云服務的需求已從 IaaS 和 PaaS 轉向 SaaS(軟件即服務)。云服務提供商需要提供或集成統一的工具鏈,打通上下游環節,幫助汽車制造商快速打通數據閉環鏈。
小鵬汽車與阿里云聯合建設了中國最大的自動駕駛智能計算中心福耀,將單機全精訓練時間從 276 天縮短到 32 天。如果 80 臺機器同時運行,只需 11 小時,處理速度提高了 602 倍。






評論