室內安防巡邏與滅火多功能機器人控制系統(tǒng)的設計與實現(xiàn)*
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢
*基金項目:國家級大學生創(chuàng)新創(chuàng)業(yè)訓練計劃項目(201910222018)。
本文引用地址:http://www.104case.com/article/202103/423639.htm作者簡介:張憲鋒(1999—),男,黑龍江哈爾濱人,2017級本科生,E-mail:zxf183813@163.com。
通訊作者簡介:郭士清(1973—),男,博士,副教授,主要研究方向為地下作業(yè)技術與裝備、機電一體化,E-mail: 61233774@qq.com。
0 引言
目前倉儲中心、超級商場等大型場所的三防依賴監(jiān)控系統(tǒng),因監(jiān)控系統(tǒng)存在盲區(qū),安保人員有限,且因安保人員安全意識麻痹及疲勞性,易出現(xiàn)監(jiān)控不到位,進而增加了事故發(fā)生的風險性。一旦發(fā)生事故,損失嚴重。因此,研制集移動機器人、消防機器人和巡檢機器人功能于一體,具有環(huán)境感知、自動報警、初級火情處理、路線規(guī)劃、動態(tài)決策功能的智能安防與滅火多功能機器人,可以滿足市場對室內自動化消防與巡檢查設備需求[1-4]。
1 機器人本體結構
室內安防巡邏與滅火多功能機器人整體采用鋁合金材料構成,由履帶移動底盤、滅火設備、事故檢測傳感器、控制系統(tǒng)組成,理論模型如圖1 所示。此機器人以卡片式電腦樹莓派作為上位控制中心,單片機作為底層驅動,激光雷達獲取周圍實際環(huán)境信息繪制室內地圖,結合溫度傳感器、火焰?zhèn)鞲衅鳌熿F傳感器檢測事故發(fā)生。

圖1 機器人理論模型
機器人工作時會事先記錄室內環(huán)境,制定巡邏路線,在巡邏的同時對室內溫度、火焰、煙霧情況進行監(jiān)控以判斷事故發(fā)生,并通過滅火設備進行及時處理。
2 控制系統(tǒng)硬件設計
室內巡邏與滅火機器人以樹莓派3B+ 運行Linux 內核的Ubuntu Mate 系統(tǒng)作為上位控制中心,如圖2 所示為實際樹莓派3B+ 硬件。使用YDLIDAR 激光雷達采集環(huán)境點云進行完成地圖構建,配合動態(tài)規(guī)劃算法控制機器人整體工作[5-6]。

圖2 樹莓派實物
機器人的下位機控制板選用主頻72 MHz 的STM32F103RET6 為核心,控制板除單片機最小系統(tǒng)外,還配有MPU6050 六軸IMU 傳感器,其內包含三軸加速度計與三軸陀螺儀傳感器,可以向上位機提供機器人實際位置歐拉角,以進行機器人導航使用,此外,控制板還具有電機驅動電路、編碼器接口電路、舵機接口電路、傳感器接口電路等多個機器人實際應用電路,局部電氣原理圖如圖3 所示。

圖3 局部電路原理圖
3 控制系統(tǒng)軟件設計
本文機器人控制系統(tǒng)軟件設計總體依賴于ROS 分布式軟件框架,其中上位控制層作為機器人控制服務器,與用戶監(jiān)控層都處于以Linux 系統(tǒng)為基礎的ROS 環(huán)境下進行操作(圖4)。下位驅動層對機器人實際執(zhí)行器與傳感器進行輸入/ 輸出控制,將數(shù)據(jù)通過RosSerial 協(xié)議上傳到上位控制層。上位控制層結合下位層數(shù)據(jù)進行激光雷達數(shù)據(jù)采集、SLAM 建圖算法、路徑規(guī)劃算法、事故檢測算法的運行,上位層各算法之間以ROS 節(jié)點方式獨立存在,并通過ROS 話題模型進行數(shù)據(jù)傳送。用戶通過上位監(jiān)控層利用SSH 方式連接至機器人上位控制層,對機器人進行狀態(tài)監(jiān)控及行為控制[8]。

圖4 機器人軟件架構
4 系統(tǒng)實驗測試
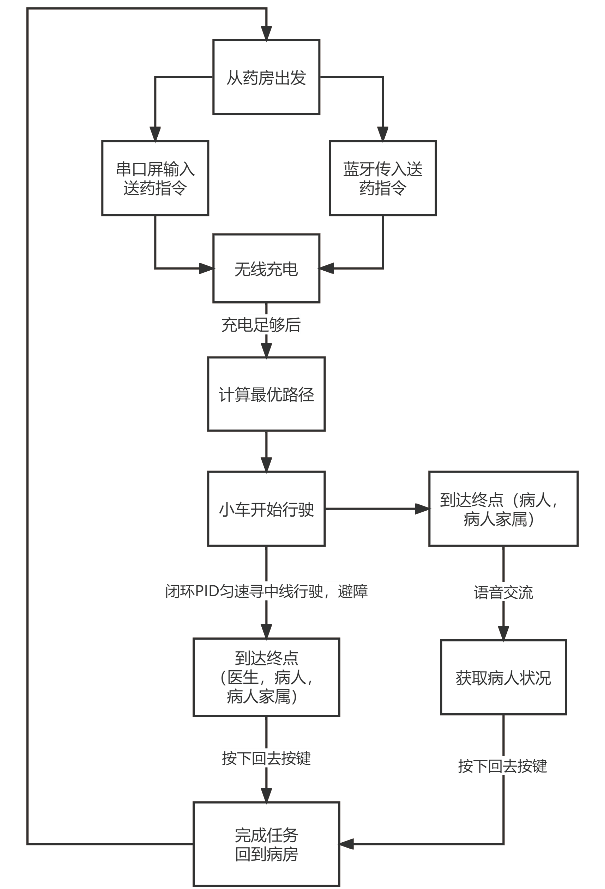
在本文機器人中電子地圖構建功能在工作中起到重要作用。為驗證本文設計機器人控制系統(tǒng)中電子地圖構建的效果,遙控機器人在室內封閉場地移動并啟動電子地圖構建程序節(jié)點,待機器人移動一周后,觀察機器人電子地圖構建功能的完成度,整體實驗流程如圖5 所示。

圖5 實驗流程圖
實際搭建測試場地如圖6 所示,機器人實時建圖結果由圖7 所示。由對比可以觀察出實際場景與機器人實時地圖構建顯示地形重合率95% 以上,可以滿足使用需求。

圖6 測試場地
5 結語
針對室內安防巡邏與滅火多功能機器人的工作特性,對機器人具體功能進行分析,設計并實現(xiàn)了室內安防巡邏與滅火多功能機器人控制系統(tǒng),并對控制系統(tǒng)的電子地圖構建功能進行樣機實驗。最終得出結論:本文控制系統(tǒng)可以實現(xiàn)室內安防巡邏與滅火多功能機器人的基本功能。

圖7 機器人實時建圖顯示
參考文獻:
[1] 王嶸,萬永菁.一種基于SLAM的多功能探索機器人設計[J].機械與電子, 2019(9):51-53,58.
[2] 張琪琦,吳葉蘭,王建濤,等.基于ROS的智能家居服務機器人設計[J].信息技術與信息化,2019(5):91-94.
[3] 壽佳鑫,張志明,蘇永清,等.基于ROS和激光雷達的室內移動機器人定位和導航系統(tǒng)設計與實現(xiàn)[J].機械與電子,2018,036(011):76-80.
[4] 李鐵妮,朱浩然,葛宇航.基于多傳感器信息融合技術的室內火災搜救型機器人設計[J].科技與創(chuàng)新,2019(4): 134-135.
[5] 王昊,關豪,王鵬飛,等.基于ROS系統(tǒng)的攝像頭循跡小車設計[J].信息技術與信息化, 2019(02):96-98,103.
[6] 胡明玥,杜鵬.基于ROS的手柄遙控小車實現(xiàn)[J].電腦迷,2017(32):66.
[7] 程東鋒,袁建軍,徐慶龍.基于ROS的路探機器人智能導航設計[J].機電一體化,2018,24(1):35-39,51.
[8] 胡春旭,熊梟,任慰,等.基于嵌入式系統(tǒng)的室內移動機器人定位與導航[J].華中科技大學學報(自然科學版),2013,41(增刊1):254-257.
(本文來源于《電子產品世界》雜志社2021年1月期)




評論