EEPW首頁(yè) >>
主題列表 >>
地圖構(gòu)建
地圖構(gòu)建 文章 最新資訊
基于Wi-Fi指紋定位的智能車仿生聲納SLAM算法研究
- 針對(duì)基于SLAM技術(shù)智能車在室內(nèi)構(gòu)建二維經(jīng)驗(yàn)圖優(yōu)化問(wèn)題,在RatSLAM的基礎(chǔ)上,采用仿生聲納系統(tǒng)代替視覺(jué)傳感器的BatSLAM模型和Wi-Fi指紋定位,實(shí)現(xiàn)室內(nèi)的二維經(jīng)驗(yàn)圖優(yōu)化。本文在BatSLAM的基礎(chǔ)上,使用Wi-Fi指紋定位技術(shù),離線階段構(gòu)建指紋數(shù)據(jù)庫(kù),在線階段使用K加權(quán)近鄰算法實(shí)現(xiàn)在線指紋匹配,提高定位的準(zhǔn)確性和精度,從而改善經(jīng)驗(yàn)圖的失真問(wèn)題。
- 關(guān)鍵字: 同步定位 地圖構(gòu)建 Wi-Fi指紋定位 智能車 K加權(quán)近鄰算法 仿生聲納系統(tǒng) 202008
室內(nèi)安防巡邏與滅火多功能機(jī)器人控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)*
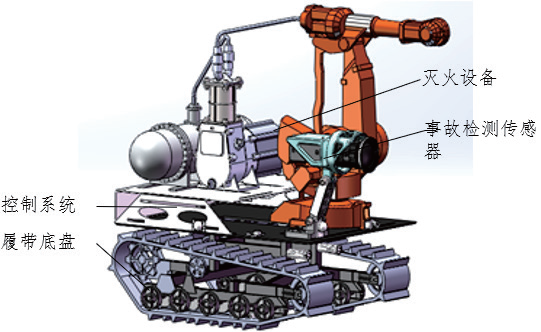
- 針對(duì)室內(nèi)大型場(chǎng)所的三防自動(dòng)化困難問(wèn)題,設(shè)計(jì)了一款室內(nèi)安防巡邏與滅火多功能機(jī)器人,具有電子地圖構(gòu)建、定位、導(dǎo)航、事故處理與遠(yuǎn)程監(jiān)控等功能。給出了該機(jī)器人總體組成與控制系統(tǒng)軟硬件架構(gòu),并對(duì)機(jī)器人核心的電子地圖自主構(gòu)建功能做了實(shí)驗(yàn)測(cè)試。試驗(yàn)結(jié)果表明,該機(jī)器人可以自主構(gòu)建出現(xiàn)實(shí)環(huán)境的電子地圖,保證定位與導(dǎo)航功能的實(shí)現(xiàn)基礎(chǔ)。
- 關(guān)鍵字: 機(jī)器人操作系統(tǒng) 地圖構(gòu)建 路徑規(guī)劃 室內(nèi)安防 202101
| 共2條 1/1 1 |
地圖構(gòu)建介紹
您好,目前還沒(méi)有人創(chuàng)建詞條地圖構(gòu)建!
歡迎您創(chuàng)建該詞條,闡述對(duì)地圖構(gòu)建的理解,并與今后在此搜索地圖構(gòu)建的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對(duì)地圖構(gòu)建的理解,并與今后在此搜索地圖構(gòu)建的朋友們分享。 創(chuàng)建詞條
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會(huì)員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機(jī)EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國(guó)際技術(shù)信息咨詢有限公司
 京ICP備12027778號(hào)-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號(hào)-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國(guó)際技術(shù)信息咨詢有限公司