基于系統工程的汽車電子CAN 通信協議設計

在試錯法中,由于各個零部件供應商都是基于自己的零件的需求出發考慮對協議的需要,無法從整個系統的角度考慮零部件之間的相互影響和作用。所以將不同需求集成的結果存在潛在設計錯誤,而這些錯誤在仿真過程中難以發現,也無法通過測試的手段解決。
系統工程法則從系統級需求出發,充分考慮零部件之間的相互作用和需求,在系統層面對通信協議進行設計,因此在設計過程中可以對設計結果進行優化,并驗證設計結果的正確性。下面的內容就對系統工程設計法進行詳細的介紹。
CAN協議設計中的主要內容
CAN協議設計的主要內容是創建消息、分配消息優先級并確定消息的周期。下面對CAN通信的基本原理進行分析,分別說明其重要性。
CAN總線采用多主結構,CSMA/CA(Carrier Sense Multiple Access/Collision Avoidance)和按位仲裁機制決策訪問總線的節點。CSMA/CA指節點在發送的同時也在監聽總線,已避免沖突的發生,按位仲裁則規定了顯性信號比隱性信號優先,顯性信號和隱性信號同時往總線上發送時,總線上是顯性信號。在本文以顯性信號用“0”表示,隱性信號用“1”表示。在下面的例子,我們也用低電平表示顯性信號,高電平表示隱性信號。
為了說明設計中的主要問題,下面以有3個節點的總線通信為例。如圖1所示有3個節點通過CAN總線相互連接。

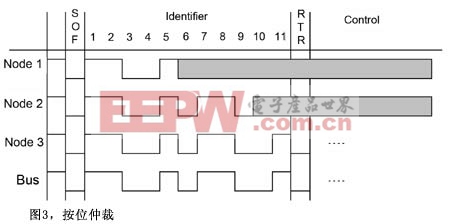
每個節點的內部程序決定了何時需要通過總線發送數據,消息有固定的格式。如圖2所示,CAN消息由起始位SOF、ID域、control域等字段組成。其中的ID域代表了消息的優先級,在有總線競爭的時候,根據按位仲裁原理,ID小的優先級高,消息被優先發送。圖3是仲裁的一個例子,假設在某一時刻,三個節點同時往外發消息,每個節點發送的消息ID(二進制格式)分別為:ID1=11001101010,ID2=11001011011,ID3=11001011001。每個節點都以發送SOF位開始,然后逐位發送ID域。不發送消息的節點,監聽到SOF位后自動轉為接收節點。發送節點之間的仲裁發生在ID發送的過程,發送過程中發送節點同時在監聽總線上的信號,只要發送信號與監聽到的信號一致,發送過程將繼續,否則停止。如圖所示,節點1在第6位上發送的是隱性信號,但是總線上的信號是顯性信號。節點1停止發送,轉為接收節點。在第10位的時候,節點2發送隱性信號,但是總線是顯性信號,所以節點2又停止發送,轉為接收節點。至此仲裁結束,節點3仲裁勝利,繼續發送消息余下的數據位。
從這個過程可以看出,由于消息ID3優先級高,所以優先發送。ID1和ID2均需要等待下次仲裁決定是否發送。也就是說每次仲裁的結果是有的消息的發送要被延遲。
另外,CAN協議規定,消息沒有發送完畢不會釋放總線。因此有低優先級的消息在發送的時候,高優先級的消息也會被延遲。
延遲也是影響CAN通信性能的主要問題,如果消息延遲時間過長,將影響接收節點的功能,嚴重的還可能造成事故。因此CAN協議設計的重要內容之一是控制消息的延遲時間在合理水平。
而消息優先級和周期是設計中影響延遲的主要因素,合理分配ID和確定消息的周期可以對延遲進行有效控制,因此CAN協議設計的一個主要內容就是如何合理分配消息ID和確定消息的周期。創建消息也是重要的內容之一,但是對延遲的影響相對較小。
CAN協議的系統工程設計方法通過對通信中的時間進行量化,依據量化結果分析功能之間的交互關系,從而進一步創建消息、分配消息ID和確定其周期。
CAN協議系統工程設計方法
系統工程設計方法與試錯法的本質區別是采用了量化的體系獲取通信過程中的時間要求。圖4顯示的是通信的時間要求。TP是事件發生到數據準備好發送給驅動程序之間的時間間隔,TB是數據被組建成消息并準備發送到總線上之間的時間間隔,TT是實際的傳輸時間,TA是消息接收完畢到數據能被應用程序使用之間的時間間隔,TS是數據可以使用到實際使用之間的時間間隔。整個通信過程必須要在規定時間內完成,而這個時間就是maximum age.這個時間標志了數據發送的實時性,只要數據在這個時間范圍內送到接收節點,接收節點的功能將得到實時的執行。







評論