基于專用控制芯片的步進電機運動控制系統設計

2.2 專用控制芯片間的硬件連接
專用控制芯片TMC262和TMC429的連接簡圖如圖4所示。本文引用地址:http://www.104case.com/article/171200.htm
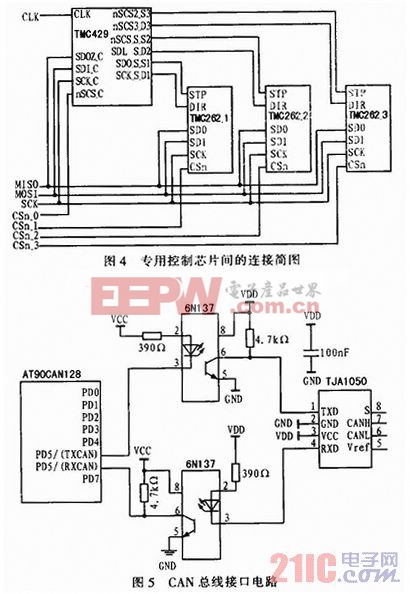
上圖為TMC429-L1(QFN32封裝)與TMC262的連接簡圖,TMC429與TMC262的通信方式有SPI模式和step/dir模式,本系統選用后者。CSN_0用于片選TMC429的SPI微控制接口,CSN_1、CSN_2和CSN_3分別用于片選3個TMC262以完成對TMC262的配置。
2.3 CAN總線通訊接口電路設計
系統CAN總線的硬件電路如圖5所示。
CAN接口電路主要由3部分組成:單片機AT90CAN128、高速光耦合器6N137和高速CAN總線收發器。其中AT90CAN128主要負責內部CAN控制器的初始化、實現數據的接收和發送等通信任務;6N137起到控制器與工業現場相隔離的目的,可以提高系統的抗干擾能力;TJA1050是控制器區域網絡(CAN)協議控制器和物理總線之間的接口,可以為CAN控制器提供差動接收性能。
2.4 RS485總線通訊接口電路設計
系統RS485總線的硬件電路如圖6所示。
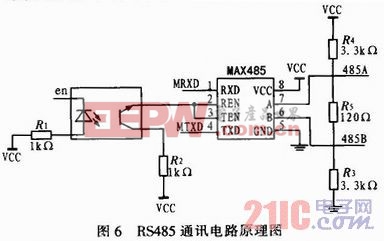
由于RS-485與TTL電平不兼容,因此兩者之間需要有電平轉換。目前完成此功能的芯片比較多,本系統中采用MAXIM公司生產的MAX485。該芯片內有接收器與發送驅動器,控制簡單,適用于半雙工通訊。為了提高通訊接口的抗干擾能力,在MAX485與單片機輸出端之間接入光電耦合器;同時在A端和B端之間增加了匹配電阻,以吸收總線上的反射信號,保證正常傳輸信號時無毛刺。













評論