專用芯片的步進電機步距角i11分控制

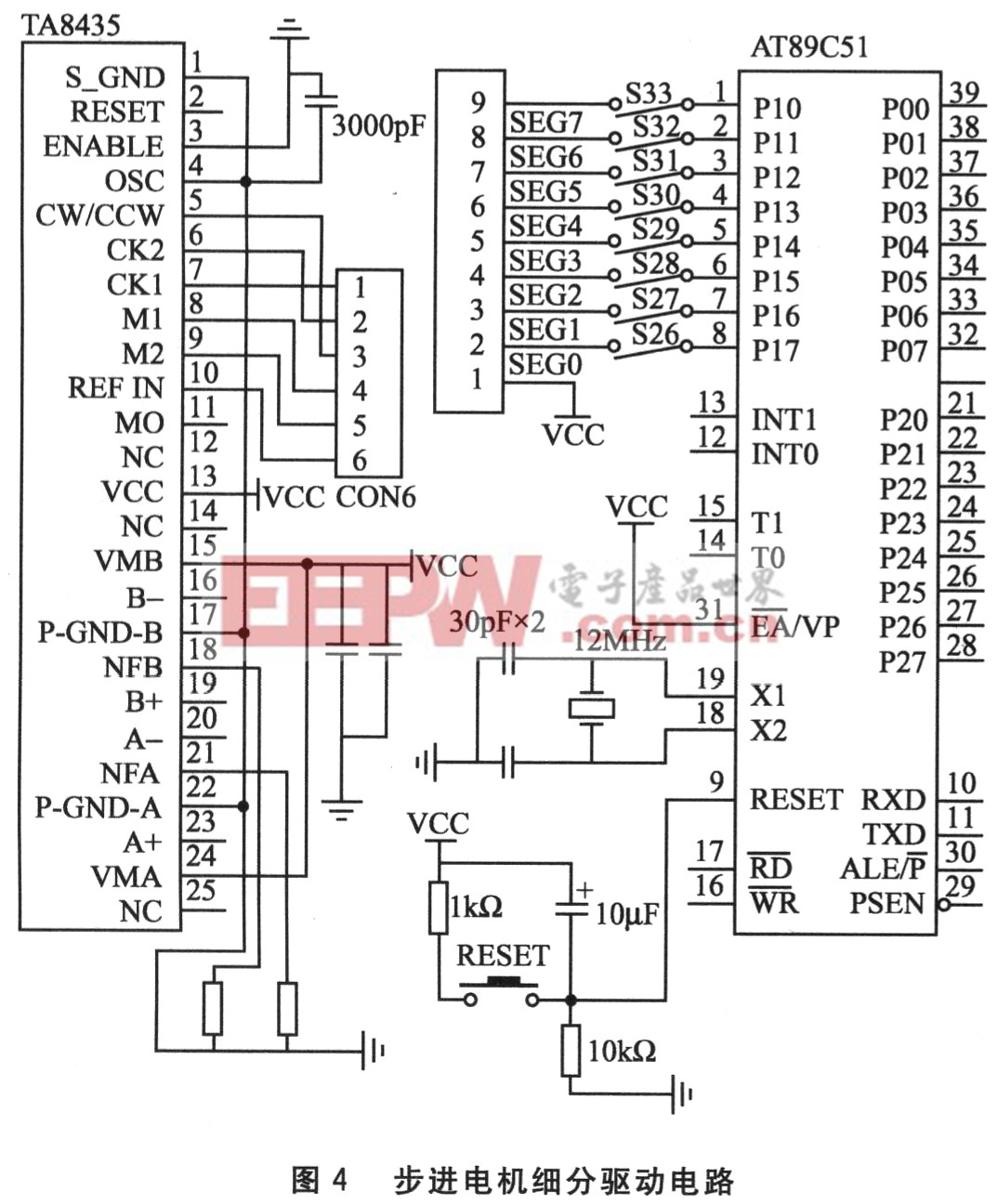
③驅動電流的設定。TA8435輸出的驅動電流由VNF和NFA、NFB引腳上所連的檢測電阻RNF決定,公式為Io=VNF/RNF;而VNF的大小由REF IN引腳電平決定,即高電平時VNF=0.8 V,低電平時VNF=O.5 V。本設計中所需驅動電流為1.5 A,因此設定REF IN引腳為高電平,RNF=O.53 Ω。步進電機細分驅動電路如圖4所示。本文引用地址:http://www.104case.com/article/163765.htm
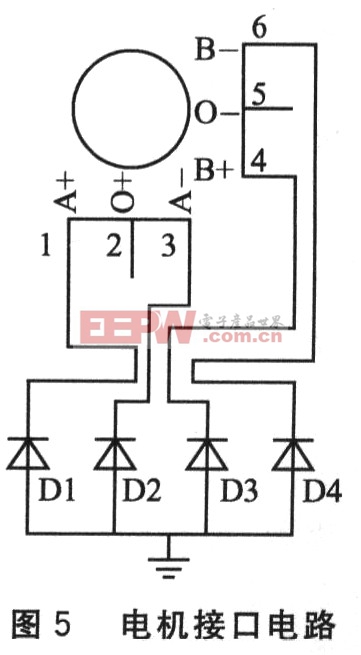
(6)步進電機接口
本電路采用四相六線制的PM42L-048系列永磁步進電動機。電機的主要參數為:步距角7.5。,步距角精度±7%。電機接口電路如圖5所示,四相按二相使用可以提高步進電機的輸出轉矩。D1~D4快恢復二極管用來泄放繞組電流,其型號為IN5822。
3 運行測試
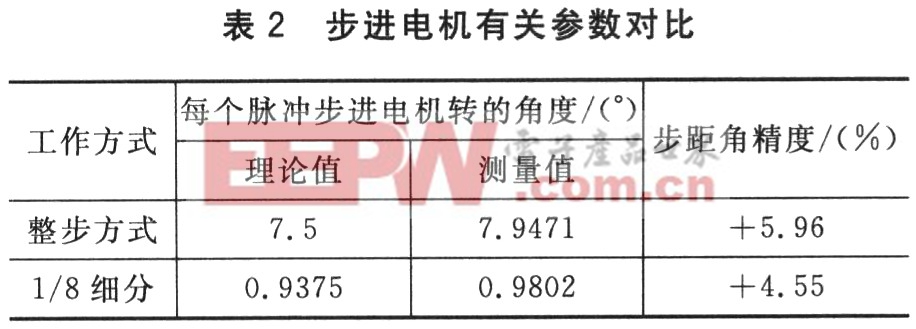
在同等條件下做兩個實驗:51單片機按照鍵盤的設置輸出相應時序的脈沖,此脈沖為TA8435的輸入標準信號。實驗1設置整步運行工作方式,TA8435輸出的脈沖沒有變化;實驗2設置1/8細分運行工作方式,TA84.35輸出的脈沖變化為上升與下降均有8個階梯波形,以實現對步進電機的細分。1/8細分時,每個脈沖轉O.981 7。,轉換成步距角為O.9802°×8=7.8416°與整步運行方式測量值比較過后,其步距角精度提高23%。每個脈沖步進電機轉的角度如表2所列。
結 語
在低速工作時,可以選用1/4細分或l/8細分模式,以提高步距角精度;在高速工作時,細分模式有可能達不到要求的速度,這時可以選用整步或半步方式,步進電機運行穩定,振動小、噪聲也小。采用單片機可以方便地控制TA8435在幾種工作模式之間的切換,而且TA8435細分芯片具有價格低、控制簡單、工作可靠的特點,所以本方案實現的細分控制技術可以有效地提高步進電機的控制精度,減小步進電機的振動并降低其噪聲。此項目是課題組在福建省科技廳的支持下研究開發的,其已在智能居家系統中的動作執行部分運行;工作可靠,性能穩定。










評論