3 實驗結果與分析
3.1 在沒有重心偏移情況下的控制結果
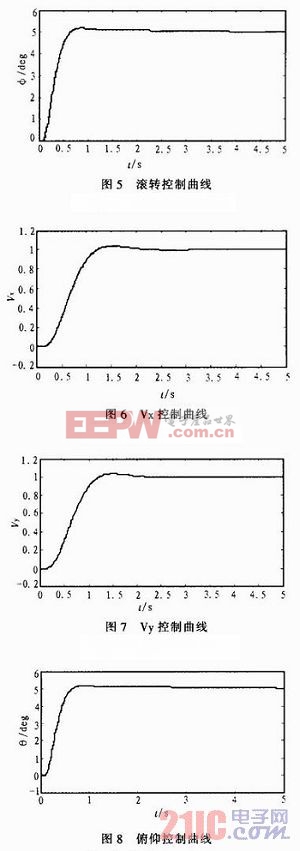
在沒有重心偏移情況下俯仰角和滾轉一起控制5度的結果表明pid能有效的控制控制量在很快的時間內達到預期的效果。本文引用地址:http://www.104case.com/article/159753.htm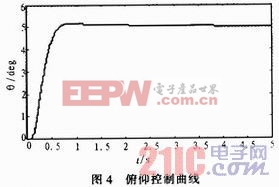
在姿態角控制基礎上近一步加入速度控制,而且速度控制只是簡單的比例控制,實驗結果很好。
3.2 重心偏移條件下的控制結果
為了檢驗PID控制效果,文中對四旋翼的重心進行了偏移,控制結果表明控制量的快速性變差,但是控制依然平滑有效。
pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理












評論