4 控制邏輯
為了方便人能更加簡單的控制四旋翼,文中加入了控制邏輯�����。操作者面北朝南���,飛機機頭可以在你前方的任意一個方向����,操作者只要按自己的方位進行前后左右控制。
公式推導:Vxcmd和Vycmd是操作者控制輸入。
首先將速度分解到飛機所在的地軸系下:
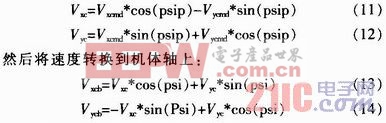
最后將速度送入控制器進行控制。
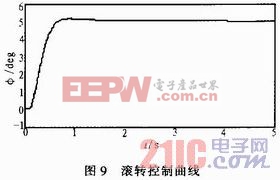
5 結論
PID控制器能有效的控制四旋翼無人機的姿態角和速度�����,而且當四旋翼的重心發生偏移時����,雖然控制的快速性有所下降,但控制效果依然滿足要求。
pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理












評論