四旋翼無(wú)人機(jī)建模及其PID控制律設(shè)計(jì)
作者:
時(shí)間:2012-10-27
來(lái)源:網(wǎng)絡(luò)
收藏
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
1.2 四旋翼無(wú)人機(jī)動(dòng)力系統(tǒng)建模
1.2.1 電機(jī)動(dòng)力學(xué)模型
其中,JTM為電機(jī)的轉(zhuǎn)動(dòng)慣量,QL為負(fù)載扭矩,Q是電機(jī)扭矩.V是電機(jī)兩端電壓,I是電機(jī)通過(guò)的電流,ω是電機(jī)轉(zhuǎn)動(dòng)角速率,Kq,Ra和Ke是電機(jī)的特定常數(shù),Kq將電流和扭矩關(guān)聯(lián),Ra是電機(jī)轉(zhuǎn)子的總阻抗,Ke將電機(jī)轉(zhuǎn)速關(guān)聯(lián)到電動(dòng)勢(shì)。
1.2.2 螺旋槳的模型
文中只考慮螺旋槳沿構(gòu)造旋轉(zhuǎn)軸的升力T和扭矩Q,忽略其受到的阻力和側(cè)向力矩。這些力或力矩均與旋翼轉(zhuǎn)速的平方(Ω2)成一定比例關(guān)系

其中,CT,CQ分別為旋翼的拉力系數(shù)、阻力系數(shù)、扭矩系數(shù)和側(cè)傾力矩系數(shù),ρ為空氣密度,R為槳葉半徑,A=πR2漿盤(pán)面積。
2 四旋翼無(wú)人機(jī)PID控制律設(shè)計(jì)
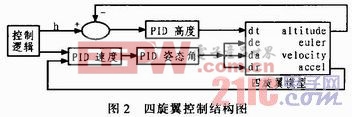
2.1 四旋翼無(wú)人機(jī)PID控制結(jié)構(gòu)
文中的主要目的是基于PID的四旋翼控制問(wèn)題研究,其最終目標(biāo)是要驗(yàn)證PID能有效的控制四旋翼在沒(méi)有重心偏移和有重心偏移下情況下的姿態(tài)角和速度。故而首先要對(duì)所用的四旋翼飛機(jī)進(jìn)行建模,然后進(jìn)行控制器的設(shè)計(jì),最后進(jìn)行仿真驗(yàn)證。本文引用地址:http://www.104case.com/article/159753.htm
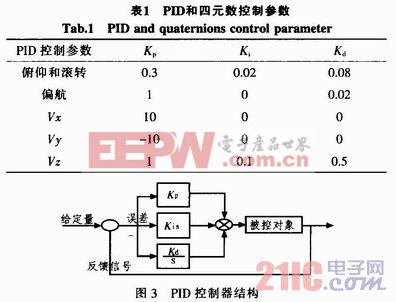
2.2 四旋翼無(wú)人機(jī)PID控制參數(shù)和PID控制器結(jié)構(gòu)圖

pid控制相關(guān)文章:pid控制原理
pid控制器相關(guān)文章:pid控制器原理










評(píng)論