消防機(jī)器人GPS導(dǎo)航系統(tǒng)的精度提高方案

實(shí)際應(yīng)用中,自適應(yīng)卡爾曼濾波器需要一定的訓(xùn)練序列與收斂時(shí)間,如果突然出現(xiàn)超出預(yù)計(jì)的誤差值(如GPS接收機(jī)進(jìn)入信號(hào)陰影區(qū)域),不可避免會(huì)引入誤差,甚至可能導(dǎo)致濾波器無(wú)法收斂,得不到正確的解。如圖四所示,為使用[4]提供的自適應(yīng)卡爾曼濾波算法,得到的機(jī)器人運(yùn)行軌跡(Matlab仿真)。前20個(gè)測(cè)量點(diǎn)是自適應(yīng)濾波器的學(xué)習(xí)過(guò)程,這時(shí)使用先驗(yàn)的誤差參數(shù);結(jié)束學(xué)習(xí)過(guò)程后,預(yù)測(cè)誤差有所減小。可以看到,在GPS接收良好的情況下,預(yù)計(jì)方位與真實(shí)方位擬合得相當(dāng)好,但是進(jìn)入陰影區(qū)域后,就引入偏差;經(jīng)過(guò)自適應(yīng)收斂過(guò)程后,降低誤差很大的GPS信息權(quán)重,軌跡曲線形態(tài)仍然相似,但是偏差已經(jīng)無(wú)法挽回了。
消防機(jī)器人是遠(yuǎn)程操控機(jī)器人,它的所有運(yùn)動(dòng)都是接收遠(yuǎn)程指令,然后送執(zhí)行機(jī)構(gòu)執(zhí)行,因此它的預(yù)期運(yùn)動(dòng)方向及方位是可精確獲知的。針對(duì)系統(tǒng)設(shè)計(jì)的這個(gè)特點(diǎn),在傳感器信息進(jìn)入自適應(yīng)濾波之前,先進(jìn)行判斷與加權(quán),與系統(tǒng)預(yù)期值距離遠(yuǎn)的數(shù)據(jù)獲得較輕的權(quán)重。如此,當(dāng)GPS信號(hào)突然惡化,誤差加劇的時(shí)候,這部分誤差對(duì)濾波結(jié)果的影響很小,在濾波器收斂過(guò)程中不會(huì)引入很大的偏移,改進(jìn)后的算法得到的預(yù)測(cè)軌跡如圖四中所示。由于GPS信息在估算中幾乎沒(méi)有影響,無(wú)法修正航位估算中的背離,因而經(jīng)過(guò)一段時(shí)間的誤差累加,估計(jì)值會(huì)逐漸偏離真實(shí)位置,如圖中所示。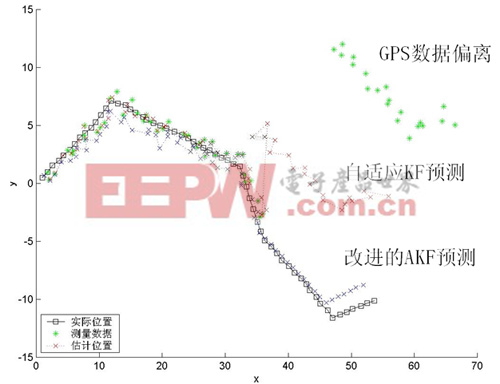
圖四 Matlab仿真結(jié)果
結(jié)論與展望
在GPS定位盲區(qū),本系統(tǒng)利用電子羅盤(pán)和路程記錄進(jìn)行精確方位的估算,能為遠(yuǎn)程盲操控消防機(jī)器人提供較為準(zhǔn)確的導(dǎo)航信息。實(shí)際應(yīng)用中,利用路程記錄的小范圍短距離航位推算較為精確。但如果處于極端情況下,即在長(zhǎng)時(shí)間接收不到正確的GPS定位信息,缺少定位基準(zhǔn)點(diǎn)的情況下,方位推算將逐漸出現(xiàn)偏移。
電子羅盤(pán)主要用于指示航向,如改用慣性陀螺儀就可以避免外界磁干擾,增加系統(tǒng)強(qiáng)壯度,但要周期性修正陀螺儀偏移;如果使用光電相對(duì)位移傳感器來(lái)測(cè)量機(jī)器人與地面的相對(duì)移動(dòng),就可以大大提高航位估算的精度,并且避免由于驅(qū)動(dòng)輪打滑等引起的計(jì)算誤差,但由于目前光電傳感器對(duì)使用環(huán)境要求較為苛刻,有待進(jìn)一步的改進(jìn)。








評(píng)論