是德科技攜多款創新性解決方案亮相汽車測試及質量監控博覽會(AutomotiveTesting Expo,簡稱ATE),受到業界廣泛關注。是德科技汽車和能源解決方案事業部總經理Siegfried (Sigi) Gross出席ATE,并接受媒體專訪;是德科技汽車與能源解決方案事業部項目經理JungikSuh發表了主題演講,介紹是德科技針對汽車與能源行業的多種創新性解決方案。來自是德科技的多位技術專家與中國汽車與能源行業從業者深度交流,針對汽車電子串行總線測試、毫米波雷達、車身
關鍵字:
是德科技 TS-8989
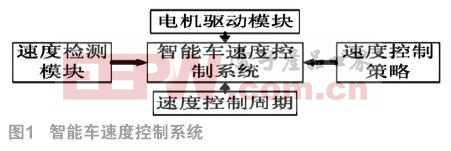
本文重點介紹了基于光電自動尋線智能車的速度控制系統的設計,包含直流電機的驅動模塊、速度檢測模塊、速度控制策略、速度控制周期等部分。采用兩片MC33886芯片來驅動電機運行,用反射式紅外對管檢測電機速度,實現對電機的閉環控制,通過大量的試驗,最終速度控制策略采用了增量式PID控制和BangBang控制相結合的方法,并創新性地使用兩個中斷相結合的方法使得速度控制周期為等時的,從而對智能車過彎速度達到良好的控制。
關鍵字:
速度控制 增量式 PID 控制 BangBang 控制 控制周期 201709
聯發科技被測設備使用羅德與施瓦茨測試系統成功地完成了A-Beidou的相關驗證,?這是全球導航衛星系統(GNSS)定位和導航演化史上的一個重要里程碑,這是第一次可以在測試儀表上面對支持A-Beidou的設備進行驗證和檢驗。 羅德與施瓦茨的R&S?TS-LBS是一個可以測試GNSS和基于網絡LBS的測試系統。該系統是由一臺用來模擬基站的R&S?CMW500?和一臺模擬GNSS信號的R&S?SMBV100A組成。R&S&n
關鍵字:
R&S TS-LBS LBS 位置服務
開發過USB設備驅動的朋友,不知有沒有碰到過下面的問題:如果你的設備驅動程序沒有經過數字簽名,那么,在XP系統下,你在每個USB口上第一次插上你的USB設備時,系統都會要求你裝一次驅動程序。這種感覺是很不好的。我們希望能像大多數USB移動盤一樣,插上設備就自動安裝驅動,然后就可以對設備進行訪問了。
關鍵字:
PID VID
本設計智能傳感器節點完成如下任務:1、具有多種傳感器輸入接口(如檢測環境溫度、濕度、光照等參數);2、同時實現多路傳感器的信號采集;3、節點具有網絡接口,可以以網頁的形式遠程登錄節點,對節點進行觀測;4、可以實現節點參數的設定,如傳感器校準、標度變換、冗余傳感器切換等;5、可以實現某些控制功能,輸出信號為電壓、電流、、PWM
關鍵字:
智能傳感器節點 信號采集 PID AT32UC3A AVR32
全球半導體聯盟(GSA)預計在2025年以前全世界會有超過750億部設備連上網絡。網絡運營商正在忙于準備應對實際上數量無限的物聯網無線模塊的網絡,聚焦于Cat 1,Cat M1和Cat NB1的設備。 過多的物聯網設備會讓網絡過載,影響它們的性能。這些設備必須經過測試以確保網絡功能正常。為此,美國最大的無線網絡運營商發布了針對支持物聯網設備的制造商的主機設備認證測試方案。認證測試方案超出了3GPP(無線通信的標準化機構)所制定的基本要求,定義了網絡中用戶設備的額外要求。
關鍵字:
R&S TS-290
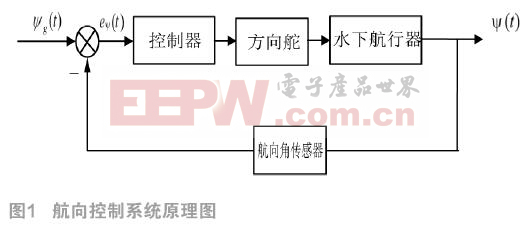
水下航行器操控性能指標中對定向性能有較高要求,而水下航行器的運動具有強的非線性和耦合性,使得不同航速下定向控制和定深轉向綜合控制成為難點。本文建立了水下航行器的運動學模型,基于滑模理論設計了航向控制器,在MATLAB SIMULINK環境下搭建了航向控制仿真系統,數值仿真結果表明,滑模變結構控制器對于不同航行條件具有較強的適應性,同時,航向的控制效果明顯優于PID控制器。
關鍵字:
水下航行器 滑模變結構控制 PID 定向控制 20170203
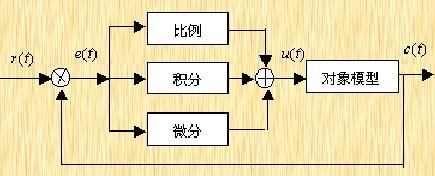
小明接到這樣一個任務:有一個水缸點漏水(而且漏水的速度還不一定固定不變),要求水面高度維持在某個位置,一旦發現水面高度低于要求位置
關鍵字:
PID
自適應神經模糊推理系統(ANFIS)依據模糊邏輯和神經元的知識,而常規的模糊控制系統是一個不能自動地將專家經驗知識轉化為推理規則庫,同時缺乏有效的方法改進隸屬度函數。該系統使用最小二乘法和反向傳播的混合算法來調整條件參數和結論參數,并且能夠根據系統本身自動產生模糊規則。根據以上內容本文采用了ANFIS,并將其應用到LED溫濕度環境的控制中。結果表明:相比于常規的PID控制,該方法能夠較好的提高溫濕度控制系統的動態穩定性和抗干擾性。
關鍵字:
ANFIS 減法聚類 溫濕度控制系統 PID
摘要:氣味源的循跡是目前的研究熱點之一,在以后的日常生活以及生產方面有著較為廣泛的運用。本文介紹了一種基于 STC12C5A60S2單片機設計的簡便智能氣味循跡小車。采用兩個氣味傳感器,根據濃度差判斷氣味流向,并
關鍵字:
單片機 PID 氣味 循跡小車
針對中央空調系統存在非線性、不確定性和干擾性等問題,提出了利用MATLAB實現模糊自適應PID控制,并對系統進行了編程仿真實驗。仿真結果表明,將該方法應用在中央空調系統中是可行的,但是MATLAB不能與現場設備進行
關鍵字:
空調 模糊 自適應 PID PLC
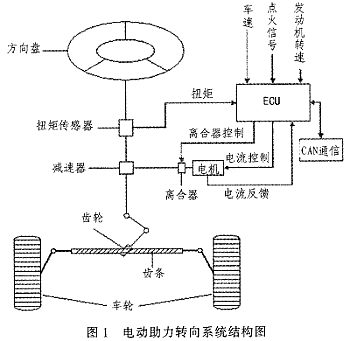
轉向系統是汽車的重要組成部分,其性能直接影響著汽車行駛的穩定性和安全性。早期的汽車轉向系統為純機械轉向系統,沒有助力,轉向動力完全由駕駛員提供,駕駛體驗差。從上世紀30年代以后,逐漸出現了助力轉向系統。目前,汽車助力轉向主要有3種形式:液壓助力轉向系統(Hydraulic Power Steering,HPS),電控式液壓助力轉向系統(Electric Hydraulic Power Steeing,EHPS)以及電動助力轉向系統(Electric Power Steering System,EPS)
關鍵字:
EPS PID
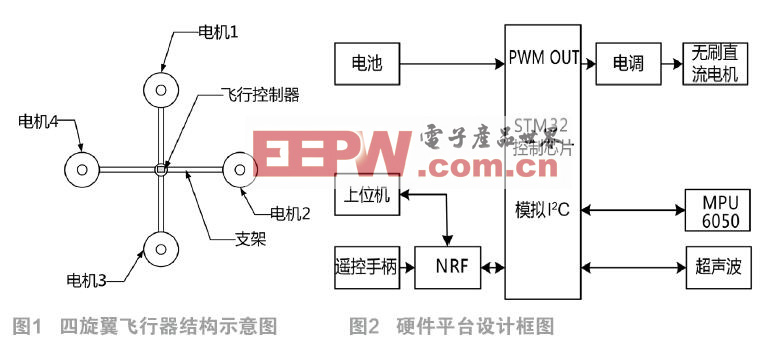
本文基于四旋翼飛行器的工作原理和性能特點,給出了飛行器控制系統設計方案,進行了姿態和高度數據采集的軟件設計,并基于卡爾曼濾波算法完成了傳感器數據融合,設計了PID控制器并完成了軟件實現。實驗結果表明,該控制系統能夠穩定可靠運行,具有較強的魯棒性。
關鍵字:
四旋翼飛行器 卡爾曼濾波 PID 魯棒性 201610
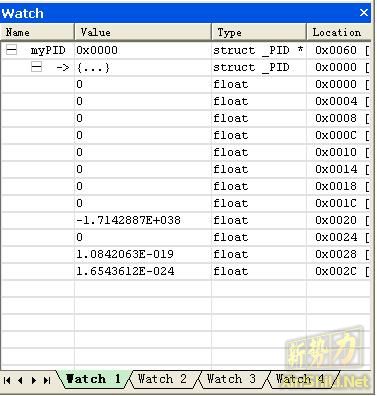
最近由于有些時間,于是想起了做一個PID設計,在網上收集了不少關于PID控制的理論,于是計劃用mega16L做一個PID測試程序,發現一些意想不到的誤差,不知各位同仁是否有遇到與我的類似的現象:我定義了一個PID結構體,在初始化的時候無法把每個元素的初始化值設置為0(見下面的仿真圖),而且,PID結構體中的部分參數是應該不變的,在整個PID運算中,但是不應該變化的參數卻在PID運算發生了變化,不知道是什么原因,到現在也無法查出原因。有興趣的朋友可以一起參與討論或有經驗的朋友 給與相關幫助,謝謝!
關鍵字:
AVR PID
1 前 言
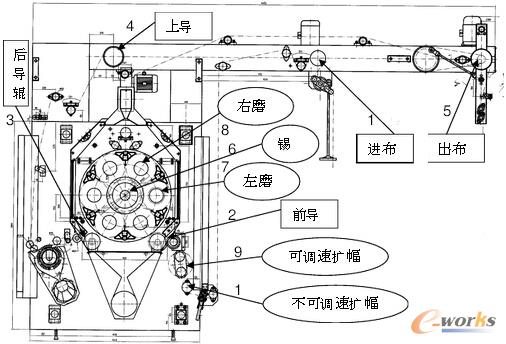
目前國內外染整設備技術發展總的趨勢是向環保、綠色、節能、低耗、高效、智能化方向發展。磨毛整理機的發展僅有幾十年的歷史。以德國、意大利為主的一些高檔超柔軟磨毛整理機誕生于上世紀90年代,到今天已經形成了廣泛應用計算機控制等高新技術的發展趨勢。隨著電子技術的迅猛發展,國內磨毛機技術的進步也相當的快,新一代磨毛機研發于21世紀初,但到目前為止其技術水平和國際最先進磨毛機尚有一定差距 。國內外磨毛機產品的技術現狀對比分析如表1.1所示。
織物的張力 是織物與磨毛輥接觸松緊度的表現。在磨
關鍵字:
PCC PID
ts-pid介紹
您好,目前還沒有人創建詞條ts-pid!
歡迎您創建該詞條,闡述對ts-pid的理解,并與今后在此搜索ts-pid的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473