安全研究員Jose Carlos Norte表示,擁有互聯網連接的拖車、廂式送貨車、甚至公共汽車,都有可能被黑客追蹤甚至入侵——如果它們使用了配置不當的“遠程信息處理網關單元”(TGU)的話。遠程信息處理系統通常配備了3G、4G、GPRS、LTE、Edge、HDSPA等調制解調器模塊,許多公司都用TGU來追蹤自家卡車的動向,以及與司機取得聯系、發送新的路線、以及其它有價值的信息。
據Norte所述,有成千上萬種此類設備在
關鍵字:
CAN
摘要:隨著新能源汽車列入國家加快培育和發展的七大戰略性新興產業,汽車的智能化、數字網絡化、節能化成了汽車發展的大方向。汽車總線是實現數字網絡化的基礎,本文將和大家聊聊當今汽車三大總線,CAN、LIN、Flexray。
今天,社會進入了信息網絡時代,人們希望汽車不僅僅是一種代步工具,更希望在汽車是生活及工作范圍的一種延伸,在汽車上就像呆在自己的辦公室和家里一樣,可以打電話、上網、娛樂、工作。
?
功能的增多也使得汽車上的電子裝置數量急劇增加,各種汽車總線也應運而生。我
關鍵字:
CAN LIN
摘要:隨著新的充電樁國家標準重磅出爐,充電樁行業又會迎來新的發展機遇。新的國家標準主要涉及充電標準、接口標準、通訊協議等層面。新公布的國家標準和原有的標準有什么區別,如何才能符合充電樁新國標安全要求?
在15年的最后幾天,隨著《電動汽車傳導充電系統 第一部分:通用要求》等5項國家標準在京發布,充電樁行業迎來新一輪的火爆討論,而新的國家標準將會在16年1月1日開始實施。本次國家標準是以國家電網、普天新能源兩大運營商為首的企業引導制定。發布的5項通用
關鍵字:
充電樁 CAN
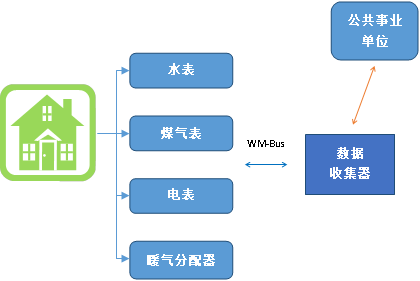
物聯網連接 隨著無線傳感器網絡、智能型儀表、居家自動化裝置和可穿戴電子產品暴增,物聯網(IoT)這個名詞也備受矚目。物聯網橫跨了智能電表和市區照明等遠程戶外網絡,以及可連網住家、住宅安保系統和能源管理的短程室內網絡。無線連接和標準型軟件協議為物聯網提供了至關重要的使能技術(Enabling technology),有個不錯的例子是:智能型儀表系統的無線連接。近年來所出現對智能型儀表最有用的無線協議之一就是無線M-Bus,它被廣泛運用在歐洲各地的儀表應用中。 圖1 – 連接儀表系統的架構 什么是無
關鍵字:
智能儀表 M-Bus
電動汽車產業在新能源背景下蓄勢待發,而充電樁、充電站的建設和管理影響著整個電動汽車的產業發展,是汽車商業化、產業化過程中的重要環節。充電樁實現對動力電池的快速、高效、安全、合理的電量補給以及更加人性化的設計是充電樁設計的基本原則要求。
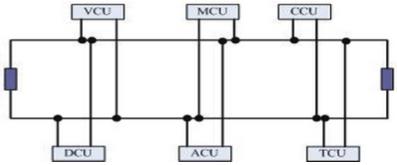
目前充電樁主要涉及到的控制管理單元包括:主控單元、電壓控制單元、電流控制單元、溫度控制單元、顯示控制單元、電池控制單元、打印控制單元。作為《電動汽車充電系統技術規范》認定的標準充電控制網絡CAN-bus把各個控制單元連接起來,工作原理是:各個控制單元完成主控電壓、
關鍵字:
光耦 CAN
摘要:總線通訊系統中,每個節點的信號質量都直接影響了整個總線的通訊質量,所有保證每個節點都具備高度一致的信號質量便顯得至關重要,該文將為大家細細道來,如果做好信號特征的好壞評估。
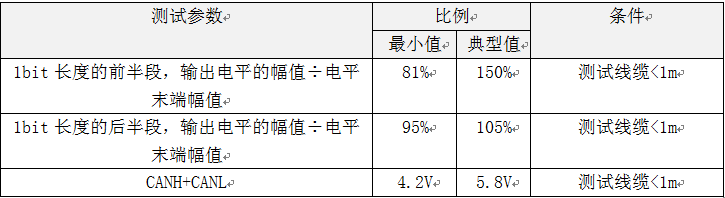
CAN總線設計規范對于CAN節點的差分電平位信號特征著嚴格的規定,如果節點的差分電平位信號特征不符合規范,則在現場組網后容易出現不正常的工作狀態,各節點間出現通信故障。具體要求如表 1所示,為測試標準“GMW3122信號特征標準”。
表 1 GMW3122信號特
關鍵字:
CAN CANScope
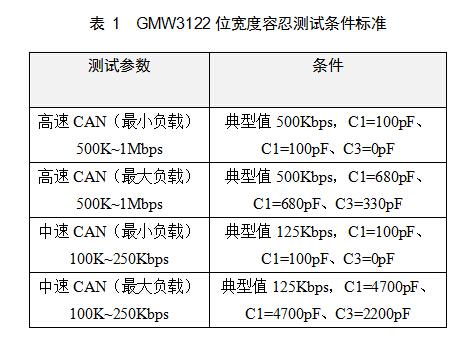
汽車CAN總線設計規范對于CAN節點的波特率容忍度有著嚴格的規定,每個節點都必須具備一定的波特率容忍度,才能使節點組合到一起后,實現較好的通信性能,不至于很容易就出現總線通訊不正常,通訊錯誤增加。具體如表 1為汽車測試標準GMW3122位寬度容忍測試條件標準
在表1所示的四種條件下,選擇被測DUT的適應條件。使用如表 2所示的報文對DUT進行發送,不出現錯誤幀則表示通過。
表2 測試報文
所以每個廠家在產品加入現場的總線之前都需
關鍵字:
CAN 波特率
摘要:總線通訊系統中,每個節點的信號質量都直接影響了整個總線的通訊質量,所有保證每個節點都具備高度一致的信號質量便顯得至關重要,該文將為大家細細道來,如果做好信號特征的好壞評估。
CAN總線設計規范對于CAN節點的差分電平位信號特征著嚴格的規定,如果節點的差分電平位信號特征不符合規范,則在現場組網后容易出現不正常的工作狀態,各節點間出現通信故障。具體要求如表 1所示,為測試標準“GMW3122信號特征標準”。
表 1 GMW3122信號特征標準
在以往的測
關鍵字:
CAN
我一直不喜歡那些盲目崇拜老外的人,但有時還不得不對行業內的老外,佩服得五體投地。他們也會出錯,寫出一些亂七八糟的文章害人,但是確實有好多設計,實在精妙,讓人拍案叫絕。
前些日子看CAN總線,那么多設備掛接在單信息總線上,都想說話,還沒有領導,那不成一鍋粥了嗎?看懂就發現,原來它們給每個接入設備分配了ID號——有大小區分的身份證,靠二進制的01級別展開無限制的競爭,一下就實現了多個設備無領導情況下的單總線競爭占用。看完后,我的感覺是美妙。這些洋鬼子,看來是聰明的,至少不比我
關鍵字:
CAN AD629
新的技術趨勢不斷出現,MCU+傳感器、MCU+無線、MCU+FPGA、大小核MCU……未來,MCU還將出現哪些新的應用?廠商將如何進行產品開發方能滿足需求?
關鍵字:
MCU CAN
摘要:目前,物聯網的概念已經風靡全球,各行各業都在想盡一切的辦法做創新,為的就是給現有的產品注入新鮮的血液,讓其煥發曾經的輝煌。CAN轉WiFi設備的現世,打破以往線纜的傳輸,讓現場總線通信實現無線聯網,甚至步入手機APP監控時代。
如今汽車已成為人類生活中最主要的交通工具,看著道路上那擁堵的情況,若你也已置身其中,那確實是一件苦惱的事情,為了解決這問題,各大廠家各顯奇招,都嘗試著用自己的概念去實現汽車物聯網,例如:阿里巴巴聯手上汽集團,將阿里系的互聯網生態覆蓋到智能汽車領域,樂視聯手北汽集
關鍵字:
物聯網 CAN
通信出現故障是時常會遇到的事情,小則無傷大雅,大可殃及城池。因此,處理故障的方法便顯得至關重要,確認處理方式是否能可靠運作更是重中之重。
當CAN通信出現故障時,CAN控制器會讓故障節點從主動錯誤狀態進入被動錯誤狀態,甚至進入總線關閉(Busoff)狀態,使故障節點脫離總線的通信,使其不影響正常節點的通信,但該控制方案將導致在系統重新上電之前,進入總線關閉狀態的節點會持續無法與其他節點做數據的交互,如若節點只是暫時的故障,那讓節點實現自恢復的功能,則是更為上乘的控制方法。所以CAN總線設計規范對
關鍵字:
CAN Busoff
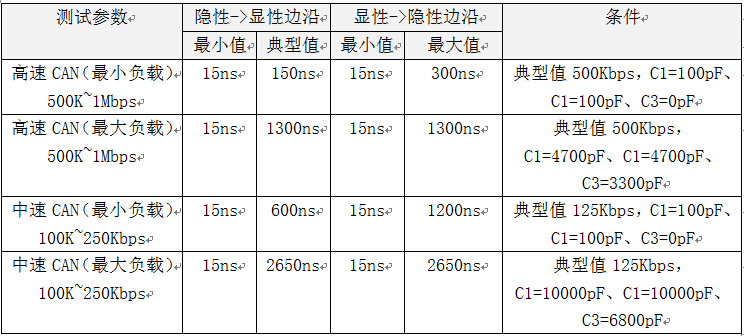
CAN總線設計規范對于CAN節點的信號邊沿各項參數都有著嚴格的規定,如果不符合規范,則在現場組網后容易出現不正常的工作狀態,各節點間出現通信故障。具體要求如表 1所示,為測試標準“GMW3122信號邊沿標準”。
表 1 GMW3122信號邊沿標準
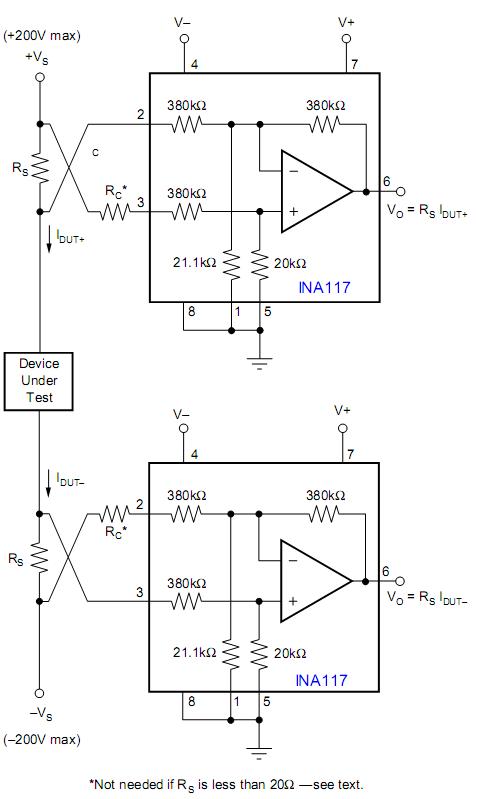
所以每個廠家在產品投入使用前,都要進行CAN節點DUT(被測設備)的信號邊沿參數測試。一般是使用GMW3122信號邊沿測試的CAN測試方法,如下描述:
如圖 1所示,我們以信號跳變過程的20% ~ 80%定義為該
關鍵字:
CAN DUT
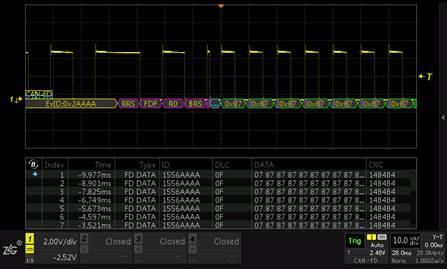
隨著電動汽車,無人駕駛汽車技術的快速發展,以及對汽車高級駕駛輔助系統和人機交互的增加,傳統的CAN總線在傳輸速率和帶寬等方面越來越顯得力不從心,CAN FD應運而生,無疑將是下一個工業行業風口。
隨著電動汽車,無人駕駛汽車技術的快速發展,以及對汽車高級駕駛輔助系統和人機交互的增加,傳統的CAN總線在傳輸速率和帶寬等方面越來越顯得力不從心,因此改進版的CAN總線應運而生。從2012年第13屆ICC大會上發布,到2015年提交國際標準化ISO 11898系列,CAN FD(CAN with Flex
關鍵字:
CAN 示波器
0引言
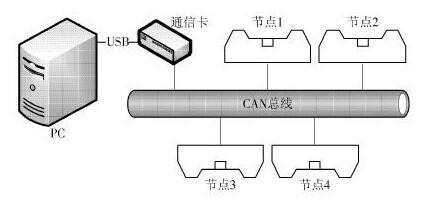
分散型控制系統中的現場終端一般由控制器和各檢測模塊構成,它們之間通過一定的通信網絡建立數據的交換鏈路。這種系統具有高可靠、開放性、靈活性、協調性、易維護等優點。然而,該分散型系統也具有終端數量多、分布范圍廣的特點。一旦終端系統軟件存在缺陷或用戶提出新的功能和指標要求時,其升級、維護的工作量和成本都非常大。本文針對上述情況,設計了一種方便、靈活、快速及穩定地對MCU節點進行在線更新的機制。基于LPC11C24微控制器組成的CAN網絡,采用IAP編程技術(In Application Pro
關鍵字:
CAN LPC11C24
can-bus介紹
您好,目前還沒有人創建詞條can-bus!
歡迎您創建該詞條,闡述對can-bus的理解,并與今后在此搜索can-bus的朋友們分享。
創建詞條
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473