- 由于被判侵犯Tessera公司的兩項封裝專利,5家大廠的多款芯片產品可能在本月下旬被美國政府禁止進口,包括高通、意法半導體、飛思卡爾、Spansion和AMD子公司ATI Technologies。
Tessera公司最早於2007年5月控告上述5家和摩托羅拉公司侵權,要求依據著名的“337條款”禁止侵權產品進口。2008年12月,美國國際貿易委員會(ITC)行政法官作出初步裁決,認定被告公司并未違反337條款。但今年5月20日,美國國際貿易委員會(ITC)推翻之前的裁定
- 關鍵字:
飛思卡爾 芯片 封裝
- 新聞事件:
飛思卡爾半導體傳感器裝運量突破10億只
行業影響:
飛思卡爾在業內商用汽車傳感器供應商中排名第一
代表了飛思卡爾與客戶的一個重要里程碑
飛思卡爾半導體提供的傳感器技術創新,幫助全球客戶過去三十年在汽車、消費、工業和醫療產品上實現重大變化。飛思卡爾一直在傳感器領域處于領先地位,最近其傳感器裝運量突破10億只,取得重要里程碑。
飛思卡爾提供行業內范圍最廣的傳感器產品系列,在成熟的傳感器市場中擁有強勁的發展趨勢,該市場涵
- 關鍵字:
飛思卡爾 傳感器 CMOS

- 前言
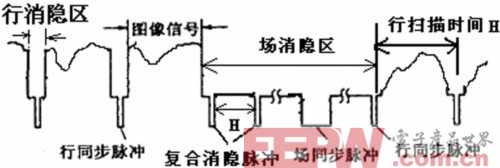
本文提出一種使用面陣CCD并且能夠有效利用S12單片機內部硬件資源的路徑參數檢測方法。普通CCD圖像傳感器的工作電壓一般為12V,輸出NTSC或者PAL制式的模擬視頻信號。利用S12內部的AD轉換器,配合從視頻信號中分離出的同步信號,可直接將圖像信號采集到單片機內部RAM中,然后通過軟件對圖像信息進行處理,得到路徑各種參數。
技術難點與解決方法:
直接利用S12單片機中的AD采集視頻圖像,存在著采集速度、存儲數據空間、處理速度、工作電壓以及同步信號分離等方面的技術難點。下面就這
- 關鍵字:
飛思卡爾 智能車 傳感技術 面陣CCD S12
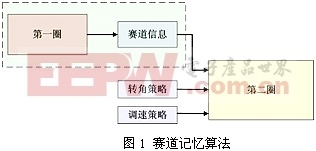
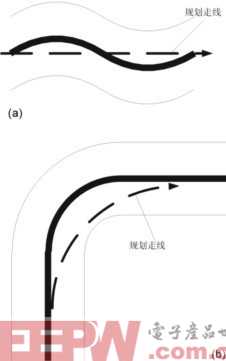
- 本文對智能車基于賽道記憶的控制算法進行了研究,分別從賽道記憶算法的實現前提、初圈記憶、數據分析與處理以及如何充分利用記憶得到的信息四個方面進行介紹。實車試驗表明,對于相對簡單的比賽賽道,基于賽道記憶控制算法的智能車可以取得較好的成績,隨著賽道的日趨復雜,賽道記憶算法也有很大的潛力。
- 關鍵字:
飛思卡爾 智能車 傳感技術 智能車 賽道記憶 控制算法

- 2006年8月21日,全國大學生智能汽車競賽暨第一屆“飛思卡爾”杯全國大學生智能汽車邀請賽決賽階段比賽在清華大學體育館舉行,來自全國57所大學的112支參賽隊用他們精心設計的智能模型車在賽場上一較高下。最終清華2隊技高一籌獲得第一名,上海交大速度之星隊和清華1隊分列二、三位,歷時8個多月的大賽終于落下帷幕。組委會主任中國工程院吳澄院士、教育部高教司張堯學司長和飛思卡爾半導體高級副總裁兼汽車與標準產品部總經理Paul Grimme先生等嘉賓現場觀看了比賽并為獲獎選手頒獎。
- 關鍵字:
飛思卡爾 智能車 傳感技術

- 摘要:本文對邀請賽選用的主控芯片MC9S12DG128單片機的一些外圍接口模塊作了介紹,包括功能上的描述和例程及初始化的過程,對一些參賽隊伍中遇到的Flash鎖死問題也提供了解決的方案。
- 關鍵字:
飛思卡爾 智能車 傳感技術

- 本文針對智能車比賽用模型車底盤,從汽車理論的角度對轉向輪定位參數、車輛的重心選擇、側滑等原理進行了介紹,并通過對轉向輪定位參數、舵機性能以及模型車轉向穩態性的測試,得出了這些調整參數之間的影響規律,可以為相關參賽隊伍在算法制定、仿真參數設定以及底盤、舵機等硬件結構調整、優化等方面提供一定的參考。
- 關鍵字:
飛思卡爾 智能車 傳感技術 前輪定位 舵機 轉向 轉彎半徑

- 韓國智能模型車競賽是韓國漢陽大學舉辦的以單片機控制為核心的可以自行尋跡行駛、以速度快慢為主要評判指標的大學生課外科技競賽,國內也將舉辦此類比賽。為了幫助參賽隊伍更好地認識智能模型車的特點,提高參賽隊伍水平,本文針對2005年韓國大學生智能模型車競賽的16支隊伍的技術方案,對電源管理、路徑識別、電機驅動、轉向控制、車速傳感等硬件結構及軟件控制特點進行了分析,對智能模型車的設計提出了建議。
- 關鍵字:
飛思卡爾 智能車 傳感技術 電源管理模塊 光電傳感器 道路自動識別 單片機
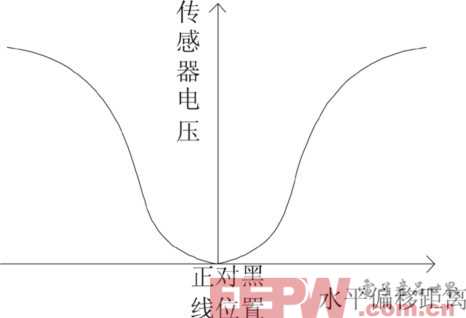
- 基于間隔布置光電傳感器的離散路徑識別算法是無人車最簡單的路徑識別算法之一,容易造成轉向及車速調節的階躍式變化,使得控制不佳。本文在對光電傳感器特性研究的基礎上,提出了一種基于間隔布置紅外光電傳感器的連續路徑偏差識別算法,得到的路徑信息是車身縱軸線偏移路徑標記線的距離,消除了傳感器間隙的“盲區”, 為控制的流暢性提供了可能。
- 關鍵字:
飛思卡爾 智能車 無人車 導航 光電傳感 路徑識別
- 要實現一個完整的基于攝像頭的智能小車,第一步要做的就是將攝像頭輸出的模擬信號通過單片機AD轉換采集到單片機中,然后對采集到的原始的圖像數據進行處理,以獲取賽道中央的黑線在圖像坐標系中的位置。
接著,就要利用處理得到的圖象信息對智能小車進行控制。就目前而言,各參賽隊用的最多的橫向控制(轉向控制)就是PID控制。采用PID控制方式,無需對攝像頭作嚴格的標定,因為只須將黑線在圖像坐標系中的位置偏差乘相應的PID系數,就可以作為轉向的控制律,至于PID系數取多少,則可以通過簡單的實驗調試而獲得合適的取值
- 關鍵字:
飛思卡爾 智能車 傳感技術 攝像頭
- 系統功能及應用
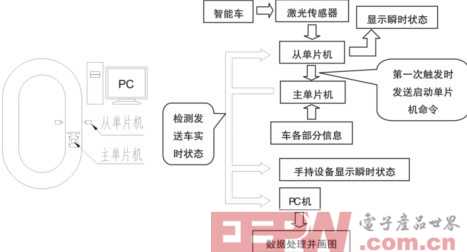
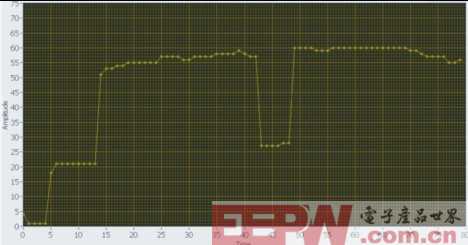
本系統主要完成將智能車行駛過程中的各種狀態信息(如傳感器亮滅,車速,舵機轉角,電池電量等)實時地以無線串行通信方式發送至上位機處理,并繪制各部分狀態值關于時間的曲線。有了這些曲線就不難看出智能車在賽道各個位置的狀態,各種控制參數的優劣便一目了然了。尤為重要的是對于電機控制PID參數的選取,通過速度—時間曲線可以很容易發現各套PID參數之間的差異。對于采用CCD傳感器的隊伍來說,該系統便成為了調試者的眼睛,可以見智能車之所見,相信對編寫循線算法有很大幫助。而且還可以對這
- 關鍵字:
飛思卡爾 智能車 傳感技術 車載數據采集系統 無線數傳系統 上位機數據處理系統
- 在去年的Freescale全國大學生智能車大賽中,賽道信息檢測方案總體上有兩大類:光電傳感器方案和攝像頭方案。前者電路設計簡單、信息檢測頻率高,但檢測范圍、精度有限且能耗較大;后者獲取的賽道信息豐富,但電路設計和軟件處理較復雜,且信息更新速度較慢。在比較了兩種方案的特點并實際測試后,我們選擇了攝像頭方案。本文將在獲得攝像頭采集數據的前提下,討論如何對數據進行處理和控制策略的實現。
數據采集
我們選擇了一款1/3?OmniVision?CMOS攝像頭,用LM1881進行信號分離,結合AD采樣
- 關鍵字:
飛思卡爾 智能車 傳感技術 CMOS 攝像頭
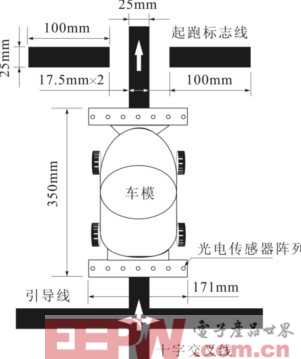
- 由于智能車模要在黑色引導線的識別過程中跑完全程,所以采用的尋線傳感器主要是光學傳感器。為了實現車模的記憶路況算法,首先要求車模系統能夠識別起跑線,并區別于十字交叉線,本文介紹了車模系統識別起跑線的紅外光電傳感器的布局模型和設計。
- 關鍵字:
飛思卡爾 智能車 紅外光電傳感器 巡線算法 起跑線 引導線
- 引言
按照第一屆全國大學生“飛思卡爾”智能車大賽比賽規則要求:使用大賽組委會統一提供的競賽車模,采用飛思卡爾16 位微控制器MC9S12DG128 作為核心控制單元,自主構思控制方案及系統設計,包括傳感器信號采集處理、控制算法及執行、動力電機驅動、轉向舵機控制等,以比賽完成時間短者為優勝者。其中賽道為在白色底板上鋪設黑色引導線。根據賽道特點,主要有兩種尋線設計方案:一、光電傳感器方案;二、攝像頭方案。
這兩種方案各有特點:其中光電傳感器構成“線型檢測陣列
- 關鍵字:
飛思卡爾 智能車 傳感技術 光電傳感器 攝像頭

- 路徑識別是體現智能車智能水平的一個重要標志,而傳感器是智能車進行路徑識別的關鍵檢測元件。針對智能車在特殊路徑與傳感器數目限制的條件下的路徑識別,提出了基于紅外傳感器的路徑識別方案與基于圖像傳感器的路徑識別方案,并對兩種方案的應用性能進行了比較。通過將基于面陣圖像傳感器的路徑識別方案應用于智能車競賽并取得優異成績,驗證了該方案的可行性與有效性。
- 關鍵字:
飛思卡爾 智能車 紅外傳感器 圖像傳感器 路徑識別
飛思卡爾介紹
飛思卡爾半導體是全球領先的半導體公司,為汽車、消費、工業、網絡和無線市場設計并制造嵌入式半導體產品。這家私營企業總部位于美國德克薩斯州奧斯汀,在全球30多個國家和地區擁有設計、研發、制造和銷售機構。飛思卡爾半導體是全球最大的半導體公司之一,2007年的總銷售額達到57億美元。
---------------------------------------------------------- [
查看詳細 ]
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473