- 實現汽車智能化的技術非常多, 本文利用目前比較熱門的技術語音控制技術, 實現小車自動前進、后退、左拐、右拐等, 當然所設計的小車只是智能汽車的微模型, 還處于模擬演示階段, 要真正實現智能汽車為人服務還有很
- 關鍵字:
方案 設計 機器人 小車 智能
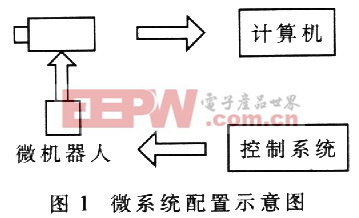
- 語音識別在微機器人控制系統中的應用,摘要:介紹了一種應用于微機器人控制平臺的語音識別算法,可實現簡單命令詞語的識別,控制微機器人的移動。利用K均值分段法,在每次計算完觀察值最佳狀態序列后,插入一個重估過程,隨時調整參數以識別下一個句子。實
- 關鍵字:
應用 控制系統 機器人 識別 語音
- 摘要:針對模塊化機器人控制,提出一種基于FPGA的片上多核主控制器設計方案。利用SOPC技術在單一芯片上設計兩個完全不同結構的核心:NiosII軟核處理器和協處理器。詳細介紹了機器人控制的路徑規劃流程、NiosII軟核體
- 關鍵字:
設計 控制器 嵌入式 機器人 模塊化

- 基于直線段匹配的移動機器人的障礙物檢測,目前,基于機器視覺的障礙物檢測方法大體上分為三類[1]。第一類方法是從單幅圖像中提取已知的障礙物[2]。這種方法的缺點是需要已知障礙物的2D圖像模式,或者需要一個學習階段。第二類方法是利用運動信息提取障礙物,
- 關鍵字:
障礙 檢測 機器人 移動 直線 匹配 基于
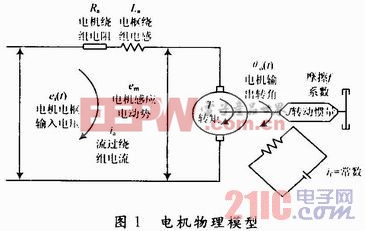
- 摘要:為了得到擬人機器人上肢關節控制電機的精確參數,通過建立直流電機的物理和數學模型,利用Matlab軟件建模和仿真,找到了一個合適的PID控制方法,通過調節KP,KI,KD參數,系統獲得了較高的控制精度和響應速度,
- 關鍵字:
參數 控制 關節 機器人 擬人
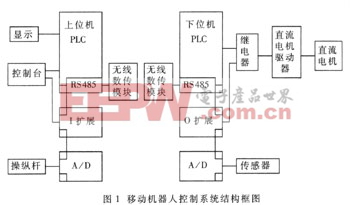
- 基于PLC的防爆機器人系統的控制,移動機器人由于具有優越的機動性和靈活性而備受青睞,在許多場合投入實際應用,如核工業檢測,消防、火場檢測,有毒、易燃、易爆氣體場所探測,采礦、星球探測及無人戰場等。為了適應不同環境下的應用,移動機器人控
- 關鍵字:
系統 控制 機器人 防爆 PLC 基于
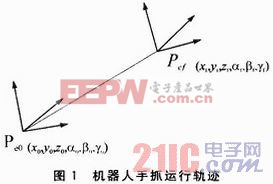
- 基于遠程機器人系統的自動控制平臺的研究與設計,摘要:論述了面向遠程機器人的自動控制平臺的研究設計。對原有的控制系統進行了簡單介紹,從設計思想、一個專用的數據結構以及運行流程方面對新的自控平臺進行了描述。關鍵詞:遠程機器人自動控制運行腳本1自動控制平
- 關鍵字:
平臺 研究 設計 自動控制 系統 遠程 機器人 基于
- 摘 要: 依據現代機器人技術的發展特點,提出了一種基于ARM(Advanced RISC Microprocessor)、DSP和 arm-linu ...
- 關鍵字:
嵌入式系統 控制系統 ARM 機器人
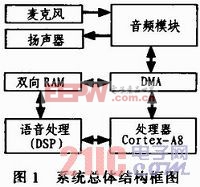
- 摘要:文中闡述的是家庭監護機器人項目中語音識別系統設計的部分,通過DSP、DMA和ARM Cortex-A8的并行處理,利用雙緩沖的方法,在嵌入式Linux上實現了基于ATK的實時語音識別系統。文中對該系統的軟硬件進行了設計。在
- 關鍵字:
監護 機器人 實現 家庭 系統 語音 識別 實時
- 醫學機器人進入臨床醫學應用,加拿大衛生部門近日宣稱,將在國內推廣一種實施神經外科手術的機器人,這種醫學機器人有特別敏感的觸覺,可以讓醫生通過最清晰的視覺來完成大腦的顯微手術。其精確度可以達到一根頭發絲的程度,甚至連最小的神經也有
- 關鍵字:
機器人

- 1 引言在項目開發中采用從英國進口的SRF05 超聲波傳感器,它的回波反饋與測距方式與通常使用的超聲波傳感器相比較特別, 在ARM中實現也稍有難度, 但該傳感器精度很高可達到1cm, 因此用該傳感器去掉了用于近距離測距
- 關鍵字:
設計 原理 導航 機器人 移動 超聲波
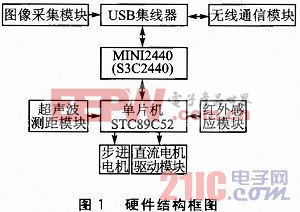
- 基于OPenWrt的移動機器人系統設計,摘要:嵌入式移動機器人實現了全方位自主移動及避障、行走中的圖像采集和無線數據傳輸。采用ARM處理器S3C2440作為主板控制器,選擇OpenWrt作為操作系統。系統采用2層架構,上層以S3C2440為核心,負責圖像采集,并將圖
- 關鍵字:
系統 設計 機器人 移動 OPenWrt 基于
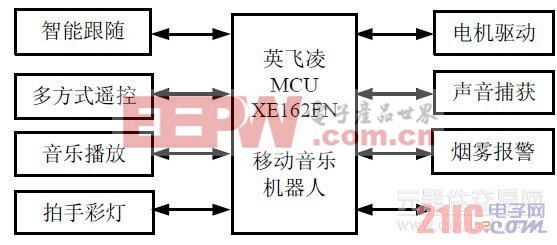
- 0 引言隨著控制技術、計算機技術、信息處理技術和傳感器技術的發展,智能機器人無論是在工業領域還是消費電子領域都已經扮演了非常重要的角色,已成為人工智能研究和發展的熱點之一。在語音控制機器人領域,有研究表
- 關鍵字:
方案 解析 設計 機器人 音樂 移動
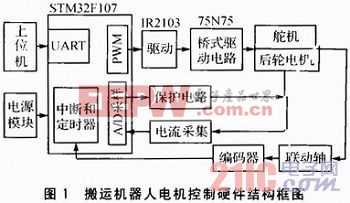
- 摘要:針對搬運機器人的前輪轉向舵機和后輪驅動電機的控制要求,采用以Cortex-M3為內核的STM32F107作為主控制器,采用嵌入實時操作系統mu;C/OS-II,將程序分成啟動任務、電機轉速控制任務、舵機控制任務等相對獨立
- 關鍵字:
控制系統 設計 電機 機器人 STM32F107 搬運 基于
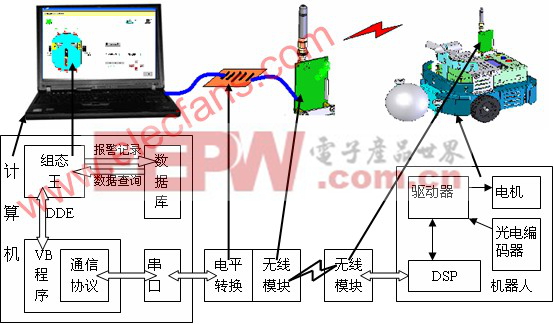
- 本設計的整體結構如圖1所示。 圖1 系統整體結構1.PC機監控軟件的設計(1)首先完成組態王和VB的DDE對話。 動態數據交換(DDE)是Windows平臺下的一個完整的通訊協議,它使應用程序間能彼
- 關鍵字:
監控 設計 組態 機器人 滅火 智能
機器人介紹
機器人目錄
機器人概述篇
機器人的組成
機器人發展史
機器人分類篇
機器人品種篇
人類與機器人
電影——《我,機器人》
北京奧運會曾經使用過的機器人
機器人學國家重點實驗室
機器人
日本最新機器人
美國戰斗機械狗研制成功 網上引發轟動
搜索引擎術語
艾西莫夫機器人三定律 機器人概述篇
機器人的組成
機器人發展史
機器人分類篇
機器人品種篇
人類與機器人
電影 [
查看詳細 ]
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司

京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473





