模塊化機器人嵌入式多核主控制器設計

摘要:針對模塊化機器人控制,提出一種基于FPGA的片上多核主控制器設計方案。利用SOPC技術在單一芯片上設計兩個完全不同結構的核心:NiosII軟核處理器和協處理器。詳細介紹了機器人控制的路徑規劃流程、NiosII軟核體系、協處理器的構架及接口以及基于SOPC的片上多核系統實現。實驗結果驗證了多核主控制器設計的可行性。
本文引用地址:http://www.104case.com/article/160565.htm關鍵詞:模塊化機器人;多核控制器;協處理器;NiosII軟核處理器
引言
隨著科技的進步,機器人技術正在向智能機器和智能系統的方向發展,其發展趨勢主要為結構的模塊化和可重構化;控制技術的開放化、可配置化;伺服驅動技術的數字化和分散化;多傳感器融合技術的實用化。機器人的內涵也已變為“靈活應用機器人技術的、具有實在動作功能的智能化系統”。近十幾年來,FPGA行業也在飛速的發展,它在實際科研開發中的地位也從處理簡單邏輯上升到了數字系統的核心處理器件。SOPC(可編程片上系統)技術的出現,使得將CPU核與設備核以及系統軟件集成到單一芯片中成為可行,它能夠幫助用戶快速開發出所需要的產品。
本文結合實際項目以一個固定基座的單臂六自由度機器人作為研究對象,提出一種基于FPGA的模塊化機器人嵌入式多核主控制器設計方案。
1 機器人路徑規劃
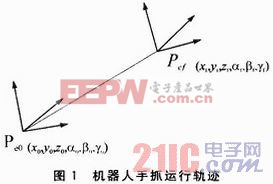
設機械臂初始和終止位姿分別記為:Xe0=[Pe0,ψe0],Xef=[Pef,ψef]。要求機械臂末端手爪沿Xe0到Xef的直線路徑運動,起點和終點分別為Pe0(x0.y0,z0,α0,β0,γ0)和Pef(xf,yf,zf,αf,βf,γf),機器人手抓運行軌跡如圖1所示。

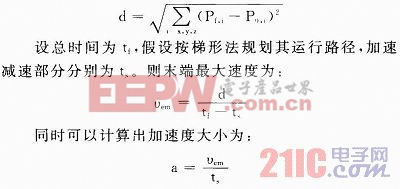
由初始點和終止點坐標計算出首末端直線距離長度為:
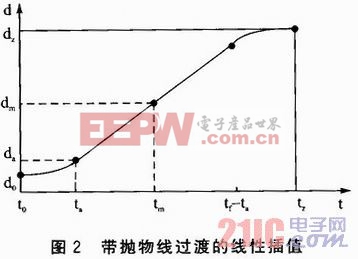
對于一個路徑段,由于兩端的過渡域具有相同的持續時間,因而在這兩個域中,采用相同的恒加速度值,只有符號相反,帶拋物線過渡的線性插值如圖2所示。






評論