“機器人” 文章 最新資訊
恒流多通道動物機器人遙控刺激系統(tǒng)的研制
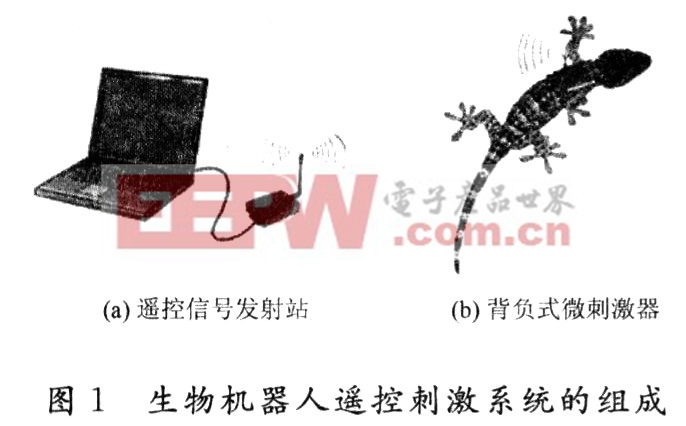
- 遙控刺激系統(tǒng)是動物機器人擺脫各種信號線束縛實現(xiàn)自由運動的必經(jīng)之路,也是動物機器人走出實驗室的必需設(shè)備,它的研制在動物機器人研究中具有重要的意義。恒流多通道動物機器人遙控刺激系統(tǒng)由“刺激信號發(fā)射站”和tt背負式微刺激器”兩大部分組成,其不但能夠?qū)崿F(xiàn)對動物機器人雙相的恒流脈沖刺激,而且每通道的多個刺激參數(shù)分別可調(diào),同時還具有多點住聯(lián)合刺激和延時刺激的功能。其中,“背負式微刺激器’’尺寸小,重量輕,能耗低,性能可靠,適合小型動物的無線刺激實驗。
- 關(guān)鍵字: 系統(tǒng) 研制 刺激 遙控 動物 機器人 通道 轉(zhuǎn)換器
基于DSP的機器人視覺伺服系統(tǒng)研究

- 基于DSP的機器人視覺伺服系統(tǒng)研究,1. 引言
機器人視覺伺服系統(tǒng)是機器人領(lǐng)域中的重要研究方向,起源于80年代初,隨著計算機技術(shù)、圖像處理技術(shù)、控制理論的發(fā)展,取得了很大進步,有一些系統(tǒng)已投入使用。視覺伺服跟通常所說的機器視覺有所不同, - 關(guān)鍵字: 伺服系統(tǒng) 研究 視覺 機器人 DSP 基于 DSP 機器人視覺伺服系統(tǒng) TMS320C6201 WT6201PA CCD攝像機
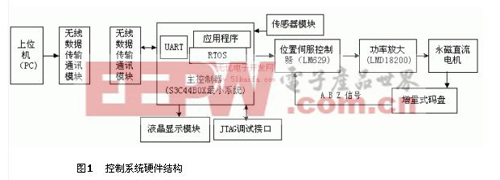
基于單片機智能機器人控制系統(tǒng)研究設(shè)計
- 引 言 單片機技術(shù)作為自動控制技術(shù)的核心之一,被廣泛應(yīng)用于工業(yè)控制、智能儀器、機電產(chǎn)品、家用電器等領(lǐng)域。隨著微電子技術(shù)的迅速發(fā)展,單片機功能也越來越強大,本設(shè)計基于單片機技術(shù)、紅外技術(shù)完成智能機器人控
- 關(guān)鍵字: 控制系統(tǒng) 研究設(shè)計 器人 智能機 單片機 基于 單片機 紅外技術(shù) 機器人 智能控制系統(tǒng)
基于模糊神經(jīng)網(wǎng)絡(luò)的移動機器人沿墻導(dǎo)航控制
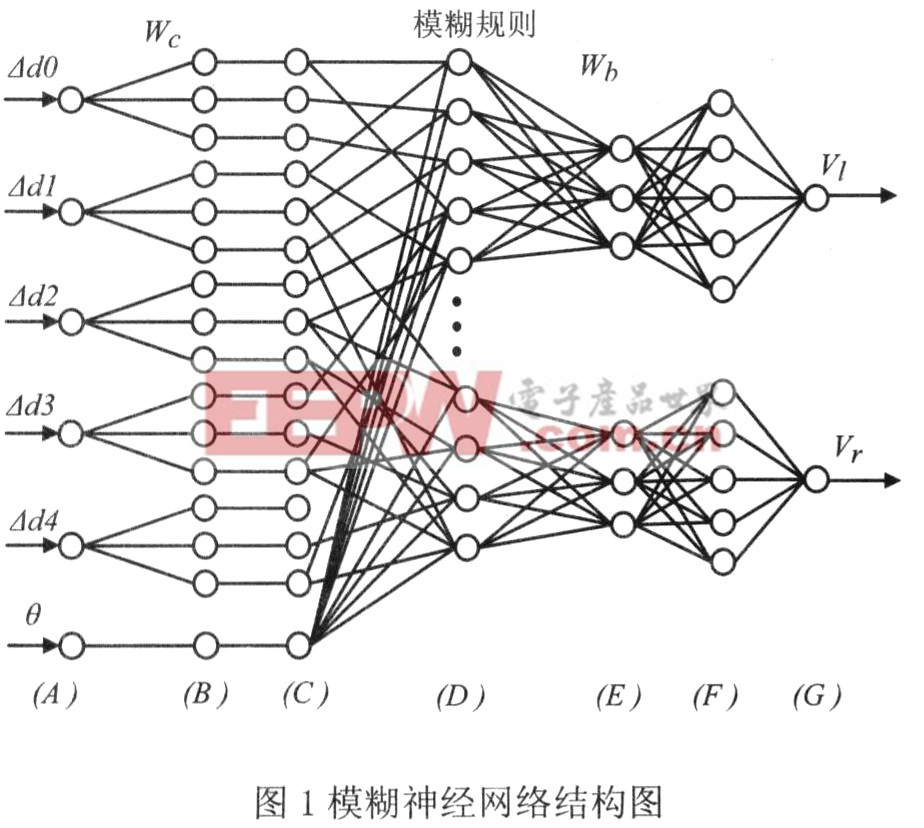
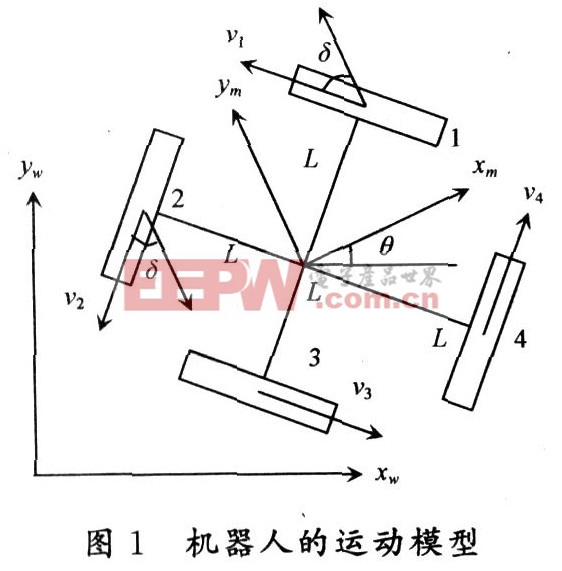
- 移動機器人沿墻導(dǎo)航控制包含了追蹤和避障兩種情況,是移動機器人研究中的常見問題。它是指機器人在一定方向上沿墻運動,或者更一般意義上的沿著物體輪廓運動,并與墻保持一定距離。移動機器人利用聲納采集機器人與墻體的距離和角度信息,通過模糊神經(jīng)網(wǎng)絡(luò)將輸入數(shù)據(jù)進行融合,從而判斷移動機器人的位姿信息,輸出左右輪速度控制其動作。實驗證明此方法可以有效地保證移動機器人在安全距離內(nèi)沿墻體運動。對比采用模糊神經(jīng)網(wǎng)絡(luò)前后的實驗,采用后的移動機器人沿墻導(dǎo)航控制軌跡優(yōu)于采用前,均方誤差大大減小。
- 關(guān)鍵字: 導(dǎo)航 控制 機器人 移動 模糊 神經(jīng)網(wǎng)絡(luò) 基于
基于DSP的欠驅(qū)動體操機器人的搖起控制設(shè)計
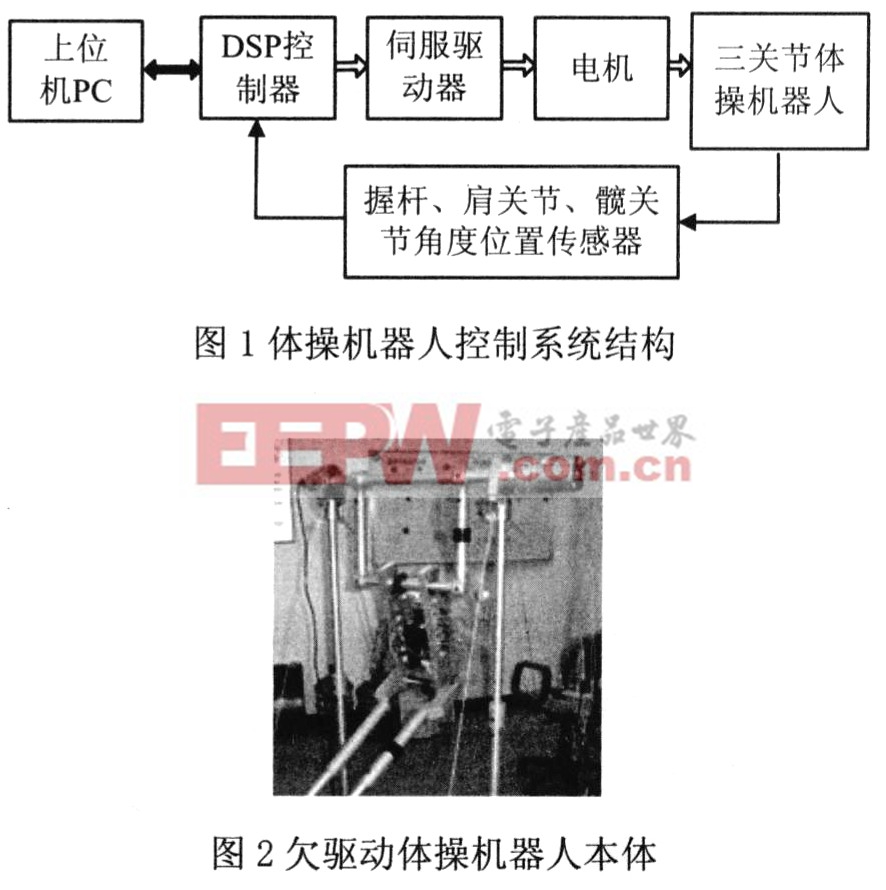
- 針對欠驅(qū)動機器人控制系統(tǒng),給出一種基于DSP控制的類人形的三關(guān)節(jié)欠驅(qū)動體操機器人。首先以ADSP218l為核心設(shè)計出控制器,通過高速PCI總線與上位機PC通訊,采用直流電機伺服控制。然后依據(jù)建立的體操機器人動力學(xué)模型提出基于能量增加的正弦和斜坡函數(shù)輸入方式,經(jīng)對體操機器人作搖起控制實驗,實驗顯示,設(shè)計的三關(guān)節(jié)欠驅(qū)動體操機器人控制系統(tǒng)滿足實時性、穩(wěn)定性和準確性要求。
- 關(guān)鍵字: 控制 設(shè)計 機器人 體操 DSP 驅(qū)動 基于 驅(qū)動器
基于ARM+μc/os Ⅱ的教學(xué)機器人控制系統(tǒng)設(shè)計與實現(xiàn)
- 基于ARM+μc/os Ⅱ的教學(xué)機器人控制系統(tǒng)設(shè)計與實現(xiàn),1.引言近年來隨著人工智能技術(shù)、計算機技術(shù)等相關(guān)技術(shù)的發(fā)展,對智能機器人的研究越來越多。在教育領(lǐng)域,許多院校已在學(xué)生中開設(shè)了機器人學(xué)方面的有關(guān)課程。為了滿足機器人學(xué)方面的有關(guān)課程教學(xué)示范和實驗教學(xué)的需求
- 關(guān)鍵字: 控制系統(tǒng) 設(shè)計 實現(xiàn) 機器人 教學(xué) ARM c/os 基于 機器人 ARM UCOS 伺服
“機器人”介紹
您好,目前還沒有人創(chuàng)建詞條“機器人”!
歡迎您創(chuàng)建該詞條,闡述對“機器人”的理解,并與今后在此搜索“機器人”的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對“機器人”的理解,并與今后在此搜索“機器人”的朋友們分享。 創(chuàng)建詞條
“機器人”電路




“機器人”相關(guān)帖子
“機器人”資料下載
“機器人”專欄文章
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司
 京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國際技術(shù)信息咨詢有限公司