基于離散布置光電傳感器的連續路徑識別算法

測定過程中,首先需要選擇測試點,即選擇與道路標記線遠近距離不同的點,如10cm、9cm、8cm……2cm、1cm等;然后在這些點上進行傳感器電壓采樣,得到這些點所對應的傳感器接收管電壓值;最后將電壓值與距離參數一一對應,便可繪制出傳感器電壓—偏離距離曲線。實測曲線如圖3所示。
本文引用地址:http://www.104case.com/article/95524.htm從曲線中不難看出,由于器件制造工藝的問題,各個光電管的性能特性存在很大差異,特別是電壓波動范圍相差較大。因此,為了給算法制定統一的標準,給數據處理帶來方便,需對各傳感器的特性曲線進行歸一化處理,具體方法有很多,比如可以把各傳感器的電壓值都處理成相對該傳感器最大電壓(白區電壓)和最小電壓(黑區電壓)的變化百分比,以使所有的特性曲線的范圍都將在0到100之間。
歸一化處理后的特性曲線如圖4。由曲線可知,該組光電管傳感器的電壓—偏離距離特性曲線基本上呈現三段形態:即兩邊偏離黑線較遠處為斜率較小的直線段,中間為斜率較大的陡升段,黑線附近處底部呈現小平臺(某些傳感器特性曲線沒有顯示出平臺是因為測試點間隔較大的原因)。利用軟件工具對這些曲線進行分段直線擬合,以得到可供算法應用的簡單線性關系曲線,結果如圖5。
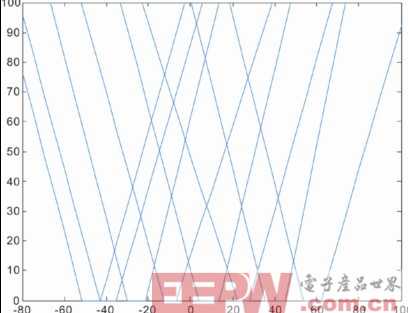
圖5 線性擬合后傳感器電壓—偏離距離特性
有了這些曲線,便可以根據傳感器電壓,來計算各傳感器與賽道中心標記線之間的距離,進而得到連續分布的路徑信息。在算法編寫過程中,需將上述得到的傳感器特性曲線參數寫入程序,作為數據庫進行保存。






評論