基于計(jì)算機(jī)仿真的全景視覺鏡面設(shè)計(jì)

2 實(shí)驗(yàn)與結(jié)果
本文引用地址:http://www.104case.com/article/85679.htm所設(shè)計(jì)的用于足球機(jī)器人的鏡面需滿足下列要求:
1) 當(dāng)機(jī)器人在場地中間位置時(shí),需要看到球門,以便區(qū)分己方球門和對(duì)方球門,確定運(yùn)動(dòng)的方向。
2) 看到的遠(yuǎn)處的球要具有較準(zhǔn)確的方向信息。
3) 看到的近處的球要具有較準(zhǔn)確的方向和距離信息,即要求近處的觀察分辨率需要達(dá)到一定的要求。
4) 盡可能少地看到機(jī)器人本身(無用信息),以便更多地獲取機(jī)器人四周的環(huán)境信息。
根據(jù)以上要求,可將鏡面分成兩部分設(shè)計(jì),一部分用來觀察機(jī)器人1m內(nèi)的范圍,一部分觀察1米外和球門的信息。實(shí)現(xiàn)過程如下:
事先根據(jù)需要考慮整個(gè)圖像的觀察區(qū)域分布,分配不同距離區(qū)間的分辨率,然后運(yùn)行仿真程序得到鏡面曲線和成像效果(見圖3),并且把鏡面曲線的各點(diǎn)坐標(biāo)保存成數(shù)據(jù)文件,方便后期的數(shù)控車床加工提取數(shù)據(jù)。實(shí)際鏡面成像效果圖如圖4所示。
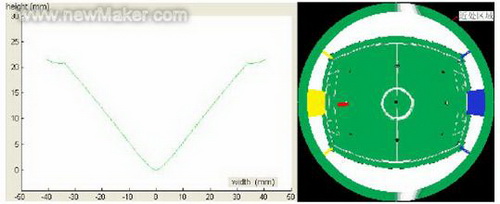
圖3 鏡面剖面圖和成像效果圖

圖4 加工完成的反射鏡面及實(shí)際鏡面成像圖
3 總結(jié)
通過虛擬仿真的計(jì)算機(jī)輔助設(shè)計(jì)方法以及鏡面逆推算法,可以方便而有效地設(shè)計(jì)出全景視覺系統(tǒng)的反射鏡面,滿足了預(yù)先設(shè)想的任務(wù)要求,在足球機(jī)器人應(yīng)用良好。借助計(jì)算機(jī)輔助設(shè)計(jì)及仿真方法,產(chǎn)品設(shè)計(jì)不僅提高了效率,更提高了設(shè)計(jì)的質(zhì)量,并且能把設(shè)計(jì)集中在創(chuàng)新上而不是一些繁瑣的計(jì)算和參數(shù)細(xì)化上。
參考文獻(xiàn):
[1] Simon Baker and Shree K. Nayar, A Theory of Catadioptric Image Formation[C], Computer Vision, 1998 Sixth International Conference, Published in Jan. 1998 on Page 35-48.
[2] José Gaspar, Claudia Décor, Jun Okamoto Jr etc., Constant Resolution Omnidirectional Cameras[C], In Proceedings of the Third Workshop on Omnidirectional Vision (OMNIVIS.02) IEEE, 2002.
[3] Fabio M. Marchese, and Domenico. G. Sorrenti, Mirror Design of a Prescribed Accuracy Omni-directional Vision System[C], In Proceedings of the Third Workshop on Omnidirectional Vision (OMNIVIS.02) IEEE, 2002.
[4] 許成珅,蔣平. 基于全維視覺的足球比賽機(jī)器人目標(biāo)定位[J].微計(jì)算機(jī)信息,2005,8-3:85-87。
創(chuàng)新觀點(diǎn):
開發(fā)了鏡面設(shè)計(jì)仿真系統(tǒng),可以設(shè)計(jì)任意需求的鏡面輪廓(包括傳統(tǒng)的一定曲面方程的鏡面和按需輸入?yún)^(qū)間成像分辨率的鏡面),并且根據(jù)該仿真系統(tǒng)設(shè)計(jì)制造了一個(gè)符合特殊任務(wù)需求的特殊曲線鏡面(不同于其他現(xiàn)有曲面)。
作者簡介:
莊惠敏(1981),女,籍貫福建省,上海交通大學(xué)機(jī)械電子系機(jī)器人所研究生,研究生,主要研究方向?yàn)橹悄軝C(jī)器人全景視覺導(dǎo)航。
曹其新(1960),男,籍貫浙江省溫州,教授,博士生導(dǎo)師,主要研究領(lǐng)域:機(jī)器人視覺,基于網(wǎng)絡(luò)的機(jī)器人智能控制。 (end)





評(píng)論