基于雙閉環模糊PID控制器的開關電源控制

電壓調節模塊(Voltage Regulator Module,VRM)具有低壓大電流輸出、快速負載變化響應、高輸出穩定度等特點,主要應用于CPU等對供電電源有特殊要求的集成電路芯片的供電。然而隨著集成電路技術的迅速發展,晶體管體積迅速減小、單芯片晶體管數迅速增加。這樣的半導體制造技術發展趨勢已經使得集成電路芯片的供電電壓越來越低,負載電流越來越大,負載變化速度越來越快、幅度越來越大。集成電路芯片這樣的越來越嚴酷的供電要求需要VRM的性能有新的提升。同時性能的提升需要傳統控制方法有新的發展和變化。
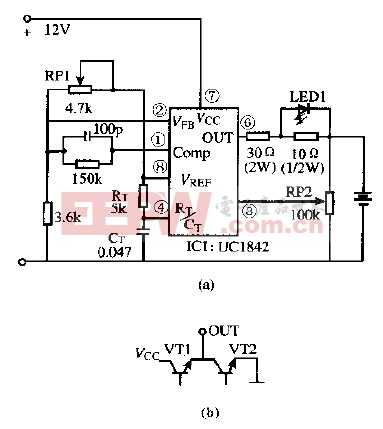
本文引用地址:http://www.104case.com/article/272211.htm傳統的模擬控制器自Unitrode公司推出UC1842系列以來便通常采用雙閉環控制方法。在這種控制器中需要一定的三角波信號作為峰值電流控制模式,或V2控制模式的控制內環輸入信號。故在這樣的控制律下一般采用輸出濾波電感的電流紋波或輸出濾波電容的電壓紋波作為控制器內環反饋信號。但采用輸出濾波電感的電流紋波信號作為控制器輸入使控制器無法直接獲得負載電流信號。所以該方法在采樣環節存在固有的響應延遲問題。而采用輸出濾波電容的電壓紋波信號作為控制器反饋輸入信號雖然可加快負載變化的反饋速度。但隨著集成電路供電電壓的不斷降低,其對電源輸出電壓的紋波要求不斷提高,輸出電壓紋波必須越來越小。從而輸出濾波電容的電壓紋波作為控制器的反饋信號必然越來越微弱,信噪比越來越低,越來越容易受到外部干擾。所以傳統的雙閉環控制律存在一定的缺陷,同時這一缺陷已經越來越無法適應集成電路工業對供電需求的發展。開關電源是一種非常典型的非線性系統,無法建立精確的模型。于此同時模糊PID雙閉環控制器,圖1作為一種優秀的線性與非線性控制相結合的控制方法具有魯棒性強,不需要對控制對象準確建模等優點得到了廣泛的應用。
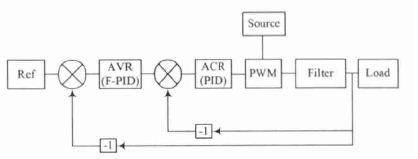
圖1控制系統框圖
本文基于Buck變換器提出了一種采用輸出電壓、輸出電流進行雙閉環控制的模糊PID(F-PID)控制方法。并通過Matlab/Simulink和Cadence PSpice聯合仿真驗證了該新型控制方法具有很好的穩定和瞬態響應性能。
1雙閉環F-PID控制器的設計與實現
本文提出的控制方法直接以負載電流作為反饋量直接控制控制器的占空比輸出值,從而避免了傳統控制器由于電流采樣點位置而造成的問題。
Matlab作為領先的控制算法設計仿真工具,特別是其中包含有模糊控制工具箱(Fuzzy Logic Toolbox)和Simulink設計仿真工具。所以本文中采用Matlab作為控制系統的控制器部分的設計仿真工具。
本控制器的SimuLink框圖如圖2.其中輸出電壓標定后作為外環的反饋量以穩定輸出電壓,輸出電流標定后作為內環的反饋量以加快負載變化響應。外環電壓控制器即AVR采用F-PID控制器而內環電流控制器ACR采用傳統的PID控制器以達到控制器復雜度和性能的折中。ACR的輸出經過PWM調制后作為Buck變換器MOSFET的驅動信號。
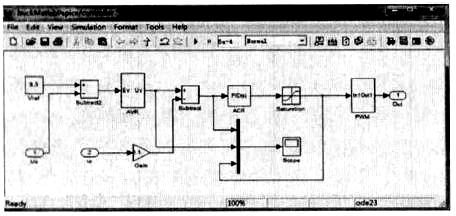
圖2控制器模塊
本控制器為了滿足VRM對于輸出電壓精確度的高要求,遂讓F-PID控制器工作電壓區間較小以提高輸出電壓精確度。AVR采用F-PID和傳統PID的雙控制器相互切換的結構,如圖3所示。其中傳統PID控制器在輸出電壓誤差非常大時進行控制,F-PID控制器在輸出電壓誤差在一定限度內時進行控制。F-PID控制器中的模糊控制器采用典型的兩輸入三輸出設計,如圖4所示。輸入量分別為電壓誤差E和電壓誤差變化率EC.輸出量分別為傳統PID控制器的KP,KI,KD的調整系數KKP,KKI,KKD.這樣可以使模糊控制器自適應PID參數的設定值,而不用一同調節其中參數。由于直接由變換器輸出電壓進行微分得到的直接誤差變化率極易受外部干擾出現很大的尖峰且直接誤差變化率變化范圍非常大達到正負1e13以上。所以本課題沒有采用微分得到的直接誤差變化率作為模糊控制器EC輸入信號,而是對其采取了取常用對數并保持原來正負的方法重新標定,如圖5所示。在微分前加入低通濾波器以及在微分后加入一階采樣保持器的方法濾除過大尖峰的辦法弱化并消除干擾的影響。
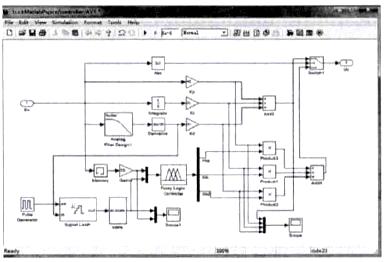
圖3 AVR模塊
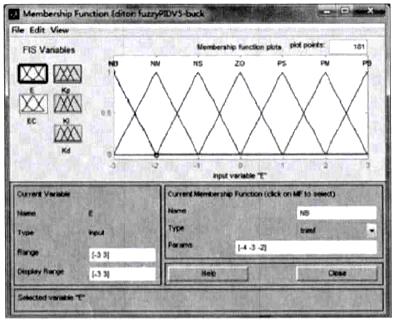
圖4隸屬度函數
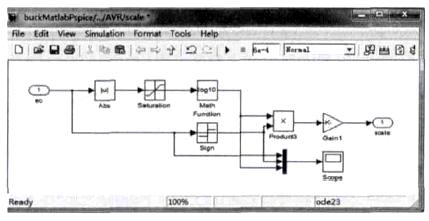
圖5 EC標度模塊

pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理
電子負載相關文章:電子負載原理






評論