一款基于ARM的多自由度人形教育機器人控制系統的設計

函數定義:void ManMoveKeyframeToFrame(void)
本文引用地址:http://www.104case.com/article/267427.htm{uint16 id,h,la1,la2,la3,ra1,ra2,ra3,ll1,ll2,ll3,ll4,ll5,rl1,rl2,rl3,rl4,rl5;uint8 t,k;/*幀號、舵機時間臨時變量*/
for(id=0;id<=ID_Max-1;id++)//把所有的關鍵動作幀細分連接起來
{t=T_Key[id];/*每一幀的運行時間*/
for(k=1;k<=t;k++){ if(id==0) { h=(H[id])*(k)/t; … ; rl5=(RL5[id])*(k)/t; }/*將第1幀特殊處理*/
else{ h=(H[id]-H[id-1])*(k)/t; … ; rl5=(RL5[id]-RL5[id-1])*(k)/t; }/*細分時間*/
ManMoveFrame(H[id-1]+h,LA1[id-1]+la1,LA2[id-1]+la2, … ,RL5[id-1]+rl5,1);/*驅動運行*/}}}
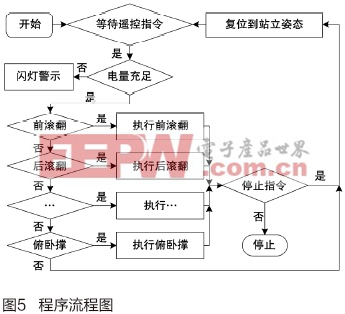
3.6 機器人程序流程
機器人根據接收到的遙控命令自行判斷并完成動作,工作流程如圖5所示。因為人形機器人使用電池,工作比較耗電,所以在運動前要先檢測工作電壓,如果達到工作要求就接著工作,否則不執行動作并報警,工作電壓不滿足要求會造成機器人因動力不足而摔倒,接收到結束命令就停止運行,不再響應外部所發來的遙控命令,如果完成一個動作就恢復到立正站立狀態[7]。
需要指出的是,在機器人運動時,程序對其外部的伺服器控制要進行分時分批控制,以減輕處理器功耗壓力,達到可靠驅動的目的。
4 結論
按照機器人的運動體態完成運動數據的設計,經過測試,該控制系統可以完成包括前滾翻、后滾翻、俯臥撐在內的多種體操運動。課題組計劃進一步封裝函數,并設計可視化圖形編程界面,以便可以在電腦上更加直觀地生成運動數據,積木化編程,降低操作難度。
參考文獻:
[1] 閻世梁, 張華等.高等工程教育中的機器人教育探索與實踐[J].實驗室研究與探索.2013(8):149-152
[2] 高彥杰.嵌入式溫度測量系統的設計與實現[J]. 數字技術與應用.2012(6):147-149
[3] 趙瑞林,盧慶林,張順星.教學型雙足步行機器人的結構及其控制電路設計[J]. 計算技術與自動化.2014(2):74
[4]付偉,王建華.一種用于仿人型機器人控制的腳本語言的設計與實現[J].計算機應用. 2014,32(8):24
[5] 劉磊,韓冰,王連弟等.一種雙足行走機構的構型設計與運動學分析[J]. 天津理工大學學報.2014(3):32-35
[6] 陳強,羅斌,秦超.仿人型機器人控制系統設計的幾個問題[J]. 自動化技術與應用.2013,32(5) 14
[7] 李紅巖,高陽東.基于LPC2131的RF遙控多關節蛇形機器人[J]. 自動化與儀表.2014(6):3-4

萬能遙控器相關文章:萬能遙控器代碼
pwm相關文章:pwm是什么
晶振相關文章:晶振原理








評論