一款基于ARM的多自由度人形教育機器人控制系統的設計

摘要:針對以往教育機器人自由度少、控制不靈活、教育功能弱的缺點,使用高集成度ARM芯片設計了一個簡潔的17自由度人形機器人控制系統。規劃了機器人的軟硬件結構,設計了控制電路和驅動系統,采用1個定時器產生17路PWM驅動信號。重點以實例講解了波形產生及驅動函數的編寫方法和技巧。設計的機器人能夠完成整套體操運動。這種方法在多自由度機器人操控和教學中具有廣泛的借鑒意義。
本文引用地址:http://www.104case.com/article/267427.htm1 系統方案設計
人形機器人控制系統包括機器人控制器和機器人遙控器兩部分。其中控制器以飛利浦公司的ARM7處理器為核心,包含17個舵機控制驅動電路與接口、串口通信調試電路、遙控接口、電源等。通過串口下載和傳輸控制信息。機器人遙控器使用無線模塊向機器人控制器發送指令,控制機器人完成規定動作。
2 硬件設計
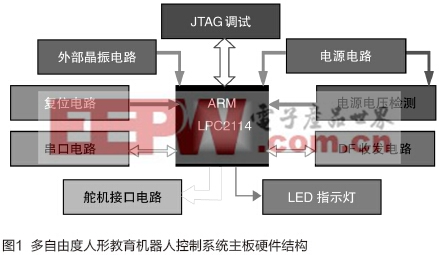
人形機器人控制器主板由控制核心LPC2114、電源及檢測電路、外部晶振、JTAG調試接口、串口模塊、遙控模塊、舵機接口、LED指示燈等組成,組成框圖如圖1所示。
LPC2114基于一個支持實時仿真和跟蹤的32位ARM7TDMI-S CPU,并帶有128 k字節的高速Flash存儲器,非常小的LQFP64封裝、極低的功耗、2個32位定時器、4路10位ADC、PWM輸出、46個GPIO以及多達9個外部中斷使它們特別適用于工業控制、醫療系統、訪問控制和電子收款機(POS)等[2]。
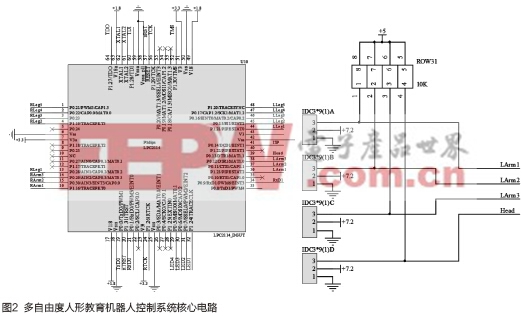
較高的功能集成度和強大的端口驅動能力使得機器人控制器主板電路的核心部分非常簡潔,基本上實現了單芯片的設計,如圖2所示為LPC2114控制器電路和4個舵機的驅動接口電路,其余13個舵機驅類同。
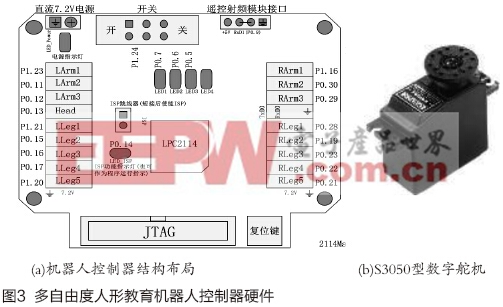
考慮到教育機器人的運動平衡控制,將PCB電路板按圖3(a)所示位置布局。該布局除了處理器最小系統,以及必要的指示和控制電路外,最重要的就是17個舵機驅動接口,這里使用彎角3排針連接,保證鏈接的緊湊和可靠。17個舵機接口分為5組,與下載接口按照左右各9個布局,其中人形機器人的頭包含1個舵機接口,負責左右運動,左胳膊包含3個舵機接口,分控肩、肘、腕3個運動自由度,左腿包含4個舵機接口,分控胯的左右/上下、膝蓋及腳腕4個自由度。右胳膊與右腿的分控接口和功能與機器人控制器左半部分對稱[3]。

萬能遙控器相關文章:萬能遙控器代碼
pwm相關文章:pwm是什么
晶振相關文章:晶振原理








評論