一款基于ARM的多自由度人形教育機(jī)器人控制系統(tǒng)的設(shè)計(jì)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢
3.3 機(jī)器人舵機(jī)整體驅(qū)動(dòng)函數(shù) ManMoveFrame()設(shè)計(jì)
本文引用地址:http://www.104case.com/article/267427.htm函數(shù)功能:將輸入的各伺服器角度轉(zhuǎn)換為各伺服器的高電平時(shí)間,按照17個(gè)伺服器高電平時(shí)間從短到長(zhǎng)依次調(diào)用對(duì)應(yīng)伺服器驅(qū)動(dòng)。共18個(gè)入口參數(shù),17個(gè)是伺服器角度,1個(gè)是動(dòng)畫(huà)停留時(shí)間,轉(zhuǎn)換關(guān)系:1度約為0.00814ms。
函數(shù)定義:void ManMoveFrame(int16 Head_Angle,int16 Larm1_Angle,… ,,int16 Rleg5_Angle,uint8 t)
{uint8 i,t1; int HeadTime,Larm1Time,Larm2Time, … ,Rleg4Time,Rleg5Time;/*與角度對(duì)應(yīng)的時(shí)間變量*/
int MotorTime[17]; /*各舵機(jī)驅(qū)動(dòng)脈沖時(shí)間數(shù)組*/
MotorTime[0]=HeadTime=Head_0+Head_Angle*Angle1;/*頭部驅(qū)動(dòng)脈沖時(shí)間*/
/*MotorTime[1]至MotorTime[16]略;*/
qsort(MotorTime,17,sizeof(int),Compare); /*對(duì)MotorTime數(shù)組快排序,使其值從小到大重排*/ …
for(i=0;i<17;i++)/*循環(huán)17次依次比較并輸出驅(qū)動(dòng)脈沖低電平*/
{if(MotorTime[i]==HeadTime) head(HeadTime);/* 如果頭部轉(zhuǎn)動(dòng)角度小則頭部轉(zhuǎn)動(dòng)結(jié)束*/
else if(MotorTime[i]== Larm1Time) Larm1(Larm1Time); /*如果左肩轉(zhuǎn)動(dòng)角度小則頭部轉(zhuǎn)動(dòng)結(jié)束*/
… else Rleg5(Rleg5Time);} while(T0TC
3.4 機(jī)器人姿態(tài)數(shù)據(jù)輸入驅(qū)動(dòng)函數(shù)ManMoveKeyframeData()設(shè)計(jì)
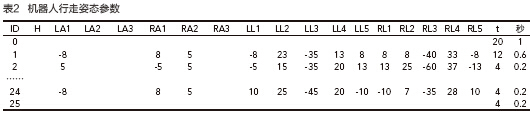
機(jī)器人動(dòng)作的關(guān)鍵姿態(tài)是由各舵機(jī)轉(zhuǎn)動(dòng)位置決定的,需要參照機(jī)器人的體態(tài)對(duì)17個(gè)舵機(jī)的自由度關(guān)系數(shù)據(jù)進(jìn)行設(shè)置,驅(qū)動(dòng)函數(shù)將如表2所示設(shè)置的參數(shù)轉(zhuǎn)換為驅(qū)動(dòng)信號(hào),控制17個(gè)舵機(jī)的轉(zhuǎn)動(dòng),從而完成機(jī)器人行走的動(dòng)作。表格空白的地方默認(rèn)數(shù)據(jù)為0。
函數(shù)功能:初始化各伺服器角度/時(shí)間數(shù)組,將機(jī)器人每姿態(tài)動(dòng)作的各舵機(jī)角度數(shù)據(jù)輸入給各伺服器數(shù)組。共19個(gè)入口參數(shù):1個(gè)關(guān)鍵幀號(hào)、17個(gè)伺服器角度、1個(gè)動(dòng)畫(huà)停留時(shí)間。
函數(shù)定義:void ManMoveKeyframeData(uint16 ID,int16 H_Angle, …,int16 RL5_Angle,uint8 t){
ID_Max++;/*動(dòng)作幀數(shù),全局變量,記錄動(dòng)作幀數(shù),每加入1幀,ID_Max的值就增1*/
H[ID]=H_Angle;/*頭的角度*/ … RL5[ID]=RL5_Angle; /*左肩的角度*/
T_Key[ID]=t;/*幀動(dòng)作完成的時(shí)間長(zhǎng)度*/ }
3.5 機(jī)器人動(dòng)作控制驅(qū)動(dòng)函數(shù)ManMoveKeyframeToFrame()設(shè)計(jì)
主要功能:把動(dòng)作幅度較大的姿態(tài)關(guān)鍵幀數(shù)據(jù)結(jié)合其下面緊挨的姿態(tài)關(guān)鍵幀數(shù)據(jù)轉(zhuǎn)換為時(shí)間均勻的普通幀驅(qū)動(dòng)參數(shù),供整體驅(qū)動(dòng)使用。入口參數(shù):無(wú)。出口參數(shù):無(wú)。

萬(wàn)能遙控器相關(guān)文章:萬(wàn)能遙控器代碼
pwm相關(guān)文章:pwm是什么
晶振相關(guān)文章:晶振原理








評(píng)論