基于ARM單片機的汽車電動助力轉向系統的研究

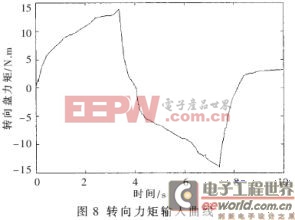
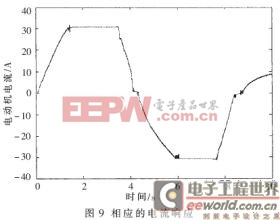
從仿真結果可以看出,采用該種控制策略,電動機輸出電流對方向盤輸入轉矩有較好的跟蹤性能,說明本文研究的模糊PD控制策略具有良好的助力效果。
參考文獻
1 田 澤.嵌入式系統開發與應用教程[M].北京:北京航空航天大學出版社,2005
2 何 瑋,劉昭度,楊其校等. 汽車嵌入式SoC系統的應用與發展[J].電子技術應用,2005;31(7)
3 余永權,汪明慧, 黃 英. 單片機在控制系統中的應用[M].北京:電子工業出版社,2003
4 麻友良,丁衛東.汽車電器與電子控制系統[M].北京:機械工業出版社,2003
5 Kim, J, Song J. Control logic for an electric power steering system using assistmotor[J]. Mechatronics, 2002;12:447~459
6 Jeonghoon S, Kwanguck B, Heung Seob Kim. Model devel-opment and control methodology of a new electric power steering system[J]. Poc.Instn Mech.Engrs Part D:J. Automo-bile Engineering,2004
7 丘 明,楊家軍, 劉 照等. 基于H_∞魯棒控制原理的電動助力轉向系統研究[J].華中科技大學學報(自然科學版),2002;32(12)
8 李書龍,許 超.電動助力轉向系統中的模糊控制[J].公路交通科技,2004;(4)











評論