基于ARM單片機(jī)的汽車電動(dòng)助力轉(zhuǎn)向系統(tǒng)的研究

摘 要: 在研究了電動(dòng)助力轉(zhuǎn)向系統(tǒng)(EPS)及其控制器(ECU)結(jié)構(gòu)和工作原理的基礎(chǔ)上,設(shè)計(jì)了基于ARM S3C44B0X單片機(jī)的控制系統(tǒng)。通過(guò)方向控制電路、H橋電機(jī)驅(qū)動(dòng)電路和PWM脈寬調(diào)制技術(shù)實(shí)現(xiàn)對(duì)電機(jī)的控制。研制的硬件控制器通過(guò)了有關(guān)的電氣性能測(cè)試,并采用模糊PD控制策略對(duì)EPS原地轉(zhuǎn)向的助力特性進(jìn)行了仿真分析。
電動(dòng)助力轉(zhuǎn)向系統(tǒng)(EPS)是汽車工程領(lǐng)域的熱門課題之一,目前研究的主要內(nèi)容為EPS系統(tǒng)的控制規(guī)則和硬件控制器(ECU)的設(shè)計(jì),而控制規(guī)則的實(shí)現(xiàn)必須以一個(gè)穩(wěn)定、可靠的控制器為基礎(chǔ)。現(xiàn)有的控制器多數(shù)基于功能增強(qiáng)的8位單片機(jī),也有的用DSP。目前,以32位處理器作為高性能嵌入式系統(tǒng)開發(fā)的核心是嵌入式技術(shù)發(fā)展的必然趨勢(shì)。ARM處理器因其具有突出的優(yōu)點(diǎn)在32位微控制器領(lǐng)域里得到非常廣泛的應(yīng)用,在32位嵌入式系統(tǒng)應(yīng)用中穩(wěn)居世界第一[1]。在汽車電子技術(shù)領(lǐng)域,從車身控制、底盤控制、發(fā)動(dòng)機(jī)管理、主被動(dòng)安全系統(tǒng)到車載娛樂(lè)、信息系統(tǒng)等,都離不開嵌入式技術(shù)的支持[2],因此,ARM處理器在汽車電子領(lǐng)域有著良好的應(yīng)用前景。本文研究了電動(dòng)助力轉(zhuǎn)向系統(tǒng)(EPS)及其控制器(ECU)的結(jié)構(gòu)和工作原理,并在此基礎(chǔ)上研究了基于ARM S3C44B0X單片機(jī)的電動(dòng)助力轉(zhuǎn)向控制系統(tǒng)。
1 EPS工作原理
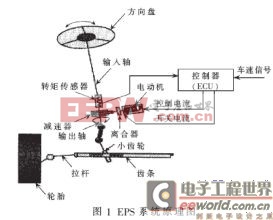
圖1是一個(gè)典型的電動(dòng)助力轉(zhuǎn)向系統(tǒng)原理圖。當(dāng)汽車轉(zhuǎn)向時(shí),轉(zhuǎn)矩傳感器測(cè)出方向盤的輸出轉(zhuǎn)矩,送給控制器ECU,控制器再綜合由車速傳感器送來(lái)的車速信號(hào),并根據(jù)相應(yīng)的控制策略確定一個(gè)目標(biāo)電流,控制電動(dòng)機(jī)轉(zhuǎn)動(dòng)。電動(dòng)機(jī)的輸出轉(zhuǎn)矩通過(guò)離合器、減速機(jī)構(gòu)施加給轉(zhuǎn)向柱輸出軸,并經(jīng)過(guò)齒輪齒條等轉(zhuǎn)向機(jī)構(gòu)的作用使車輪偏轉(zhuǎn)一定的角度,從而起到對(duì)轉(zhuǎn)向系統(tǒng)的助力作用。
2 控制器的結(jié)構(gòu)和原理
控制器主要由A/D采集電路、H橋電機(jī)控制電路和系統(tǒng)保護(hù)電路等組成,其結(jié)構(gòu)如圖2所示。當(dāng)車輛啟動(dòng)后,系統(tǒng)接收到點(diǎn)火信號(hào),開始進(jìn)入工作狀態(tài),采集轉(zhuǎn)矩信號(hào)和車速信號(hào)并送給單片機(jī)。根據(jù)已定的控制規(guī)則,由系統(tǒng)確定一個(gè)目標(biāo)電流和電機(jī)轉(zhuǎn)動(dòng)的方向,并以PWM調(diào)制的方式通過(guò)H橋電路來(lái)驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng)。同時(shí),系統(tǒng)對(duì)電機(jī)的輸出電流進(jìn)行采樣,一方面將采樣結(jié)果與目標(biāo)電流相比較,用以對(duì)電機(jī)進(jìn)行控制;另一方面結(jié)合車速信號(hào),用以對(duì)系統(tǒng)的保護(hù)[3]。當(dāng)電機(jī)電流大于設(shè)定值或車速高于設(shè)定值時(shí),為了保護(hù)電機(jī)和系統(tǒng)的安全,控制器將對(duì)繼電器發(fā)出一個(gè)控制信號(hào),斷開電機(jī)電源,停止助力,待系統(tǒng)正常后,再恢復(fù)助力功能。

3 控制器的設(shè)計(jì)











評(píng)論