基于ARM單片機的汽車電動助力轉向系統的研究

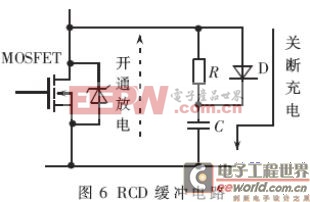
保護電路主要由MOSFET緩沖電路和系統的繼電器保護電路組成。開關器件在開通和關斷過程中可能同時承受過壓、過流、過大的di/dt、du/dt以及過大的瞬時功率,緩沖電路就是在開關過程中保護開關器件,抑制高電壓和大電流的防護措施。本設計采用的是RCD充、放電緩沖電路,如圖6所示。當MOSFET關斷時,經二極管D向電容C充電,由于二極管正向導通時壓降很小,所以關斷時的過壓吸收效果與電容的吸收效果相當。當MOSFET開通時,電容C通過電阻R放電,限制了MOSFET中的開通尖峰電流。RCD緩沖電路能有效地改善開關器件的開關特性,減小開關器件本身的功耗發熱。
繼電器保護電路主要是用于電機的過流保護并確保EPS在設定的車速范圍內工作。ECU通過對電機電流的采樣來確保電機工作在額定電流范圍內。一旦電機電流高于設定的保護值,或車速超出設定范圍,ECU就會向繼電器發出一個關斷信號,切斷電機的電源,停止助力。
4 系統控制策略及仿真
國內外學者研究了不同的EPS控制策略,如PID控制[5~6]、H_∞魯棒控制[7]、模糊控制[8]等。由于轉矩信號和車速信號的輸入特點非常適合采用模糊控制,而PD控制則具有較好的控制性能,因而綜合這兩種方法的特點,本文采用了模糊PD控制策略。其控制結構框圖如圖7所示。

這里,系統輸入為地面反作用力矩,Tsw為方向盤把持力矩,Kp為PD控制的比例系數,Kd為PD的微分系數,Ia為目標電流,Tm為電機輸出轉矩。模糊控制器通過對轉矩傳感器信號的采集,在線整定Kp、Kd參數,用于PD控制,再由PD控制來確定系統的目標電流。在MATLAB環境下應用上述控制策略對EPS系統進行原地轉向仿真,給定如圖8所示的轉向盤轉向力矩的輸入曲線,設定系統電流上限為30A。經過仿真計算得到的EPS系統對該輸入的電流響應如圖9所示。











評論