基于ARM單片機的汽車電動助力轉向系統的研究

本文設計的控制器采用32位的ARM S3C44B0X單片機作為控制器的核心,由于S3C44B0X單片機集成了豐富的硬件資源,使得電路設計大為簡化,提高了系統的可靠性,同時也為系統將來的擴展和升級留有一定余地。方向控制信號和PWM信號相結合,經光耦加載到H橋驅動電路,控制電機的運行狀態,電路簡單易行。脈寬調制方式采用單極性PWM,避免了MOS管直通的可能性,不僅可靠,脈寬占空比也易于調整。
3.1 ARM S3C44B0X介紹
SUMSUNG公司的S3C44B0X是基于ARM7 TDMI的體系結構,并在此基礎上集成了豐富的外圍功能模塊,主要有:8KB的Cache,外部擴充存儲控制器,LCD控制器,2個UART,5個PWM定時器和1個內部定時器,8路10位ADC,71個通用可編程I/O口,8個外部中斷源及看門狗定時器[4]。同時,ARM單片機支持C語言開發,有利于系統控制軟件的開發和調試。
3.2 A/D數據的采集
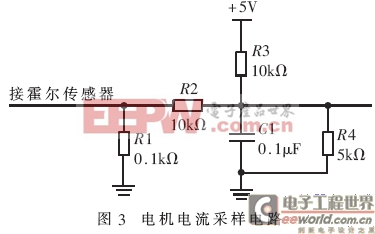
S3C44B0X采用的是逐次逼近式10位ADC,輸入電壓范圍為0~2.5V,轉換精度為2.5V/210=2.4mV。對于轉矩傳感器,其輸出電壓范圍為0~5V,所以只需對信號進行低通濾波處理和分壓處理。對于電機的采樣電流,由于有正負區別,還應通過電平轉換使其成為正電壓。其電路如圖3所示。其中,R1的作用是將霍爾傳感器的輸出信號(0~50mA)轉換成相應的電壓信號。
3.3電機控制電路
電機的控制電路由方向控制電路和光耦隔離MOSFET H橋電機驅動電路組成。電機驅動電路原理如圖4所示。T1、T2、T3、T4為光耦部件,一方面用于系統強電和弱電的隔離,另一方面用于驅動MOSFET部件。所以在選擇光耦型號時,應選擇輸出功率較強的光耦(如TLP250,其輸出電流最大可達1.5A)。電機的PWM控制信號和方向控制信號都是經光耦后加載到MOSFET部件的。當T1和T4導通、T2和T3關斷時,對應的Q1、Q2導通,Q2、Q3關斷,電機電流經Q1、MOTOR、Q4流向地,此時電機正轉;電機反轉時,器件的通斷情況正好相反。











評論