一種基于PSoC芯片的倒車雷達控制系統設計

超聲波傳感器的使用類似于雷達,它主要完成兩項任務:發送超聲聲波和接收超聲聲波。發送超聲波相對簡單,只要對超聲波傳感器發送的超聲波進行脈沖寬度調制,同時開啟計時器。而接收部分較為復雜,需要對信號進行調配,以便控制器能正確低識別反射回的超聲波、確定接收時間并停止計時器技術,然后根據“距離 = 時間×音速”計算距離。通過圖2,可以看到信號是如何被發送出去的。由控制芯片產生的PWM信號通過功率放大器放大,送到超聲波傳感器進行脈沖寬度調制,然后開啟計時器。超聲信號接收和處理的過程相對要復雜一些(圖3)。從超聲傳感器輸入的信號經PGA放大,在利用帶通濾波器濾除噪聲以后,將信號與直流偏置進行對比,通過輸出調制信號,然后再將其將發送至低通濾波器,生成調制信號的包絡線。該包絡線再通過比較器或者AD轉換器來判斷它是否是真正的反彈信號,同時停止計時器,最后通過計數器的值和音速計算出距離。
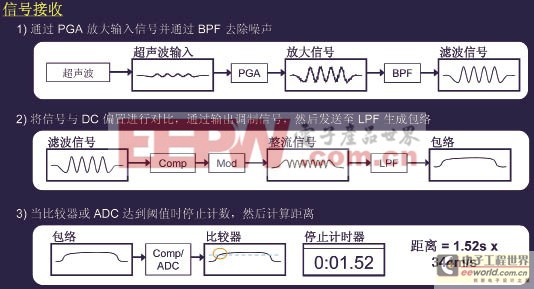
圖3 超聲波信號接收

圖4 倒車雷達的發展趨勢
圖4顯示出倒車雷達發展的趨勢,從圖中可以看到,最初的倒車雷達,只有后方探測,現在的倒車雷達不僅實現了前后方探測,甚至連左右側都可以進行探測。還有一些更先進的技術,已經使用在高檔汽車上。
低端倒車雷達系統
倒車雷達系統一般由兩部分組成,分別是探頭部分和主控部分。探頭部分一般安裝在汽車的尾部或兩側,而主控部分則位于汽車的前端,靠近汽車駕駛員。低端倒車雷達(圖5)的探頭部分,通常只包含超聲波傳感器,而主控部分包括CPU和所有的外圍電路。探頭和主控板通過傳導線連接,傳送發送和回波信號,一個主控板帶3到4個探頭。低端的倒車雷達系統成本通常較低,多采用分立元件,集成度也較低,因而性能較差,有效測量距離小于1.5m。此外,報警也采用簡單的蜂鳴器。
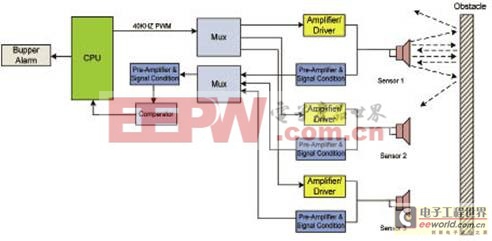
圖5 低端倒車雷達系統框圖















評論