汽車安全技術:日產轉向以攝像頭為軸心進行開發

“此前我們一直以毫米波雷達和超聲波傳感器(聲納)為軸心思考開發的,而目前安全技術正逐漸轉向以攝像頭為軸心進行開發”。日產汽車統管技術開發的豐增俊一(日產執行董事、電子技術開發本部EV技術開發本部主管),在2011年10月上旬舉行的“先進技術說明會&試駕會2011”上如是說。
日產以前一直致力于開發以毫米波雷達和超聲波傳感器為基礎來提高汽車安全的技術。不過,目前開發方向已經發生了變化,由于最近攝像頭識別技術的發展,安全技術的核心轉向了攝像頭。據介紹,毫米波雷達和超聲波傳感器將主要起輔助作用。
追加移動物體檢測功能
日產汽車利用攝像頭的代表性安全技術,包括顯示車輛周圍俯瞰影像的“環視顯示器”。所謂環視顯示器,是將車輛前后左右各一個共四個攝像頭的影像合成為一個影像顯示。日產汽車在2007年10月上市的“君爵”(Elgrand)中配備了該系統。
此次,日產汽車為環視顯示器追加了檢測移動物體的功能。該公司還開發出了在攝像頭的影像數據基礎之上識別周圍“運動物體”的算法,并配備在了電子控制單元(ECU)上。將首先用于2011年11月進行局部改進的君爵。
一個攝像頭實現三項功能
作為利用攝像頭的新一代技術,日產汽車公開了車輛前后各安裝一個攝像頭便可實現多項功能的演示(圖1)。日產汽車表示,“我們將最大限度地利用已經配備的硬件,沿著抑制成本同時提高附加值的方向大力推進技術開發”。

圖1:通過前方和后方各一個攝像頭實現多種功能
日產汽車開發出了僅通過前方攝像頭和后方攝像頭來提高安全性的技術。除了識別車輛前方的汽車和行人外,還可以實現道路標志線的識別,車輛后方移動體檢測等多項功能。
汽車前部安裝的一個前方攝像頭可實現三項功能,分別是當前方車輛靠近時通知駕駛員的功能;檢測道路標志線與汽車位置之間的距離,一旦出現偏離車道的跡象就發出警告提示音的功能;在低速行駛狀態當前方有行人時提醒駕駛員注意的功能。車輛和行人通過移動物體的形狀和速度等進行分辨。
試制車在室內鏡前方設置了前方攝像頭。攝像頭模塊與進行圖像識別處理的ECU融為一體。攝像頭的攝像元件采用像素為640×480(VGA)的CMOS傳感器。水平視角僅為40度左右,最大可以識別前方100m左右。
一個后方攝像頭可實現三項功能,分別是道路標志線識別功能;在行駛過程中檢測斜后方死角駛來的車輛和摩托車的功能;從停車場出來時識別車輛后方移動體(人和車輛等)的功能。攝像元件采用CMOS傳感器,像素與前方攝像頭相同。不過,水平視角提高到180度。因此攝像頭的檢測范圍只有20~30m左右。
在一個攝像頭可實現多種功能的情況下,估計今后將推進標配的是后方攝像頭的三個功能。目前,北美地區正計劃在2014~2015年前后強制設置可從駕駛席確認后方情況的后視攝像頭。原因是很多北美用戶會在停車場以車頭朝前的方式停車,當倒車離開停車場時在車輛后方與行人發生碰撞事故的情況非常多。
日產汽車看準了今后將強制設置后視攝像頭的趨勢,計劃“從2012年投放的新型車開始陸續采用”基于后方攝像頭的三項功能(豐增)。
毫米波穿過車輛和道路間的縫隙
此外,有項新功能提高了采用傳統毫米波雷達的安全技術價值,日產汽車還就此利用試制車進行了演示。這就是通過毫米波雷達識別因前方車輛遮擋而看不到的前方狀況,從而避免碰撞的駕駛支援系統(圖2)。
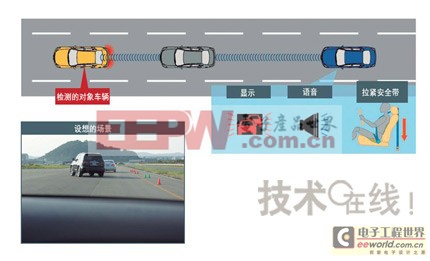
圖2:利用毫米波掌握前方第二輛汽車的行駛情況
日產汽車公開了通過毫米波雷達識別因前方車輛遮擋而看不到的前方狀況,從而避免碰撞的駕駛支援系統。目的是通過掌握前方第二輛車的行駛狀況減少碰撞事故。
在高速公路上前方車輛車身較高時,若前方第二輛車的速度非常慢或緊急減速時,除存在與前方車輛一同追尾的危險外,因前方車輛突然變更車道,從而與前方第二輛車撞上的事故也經常發生。
此次開發的系統利用毫米波雷達監控與前方第二輛車的車距和相對速度,有碰撞危險時通過顯示、聲音以及拉緊安全帶來提醒駕駛員注意。
毫米波雷達可以采用與原來相同的產品,因此無需變更硬件。前方第二輛車可以利用前方車輛底板與行駛道路間通過的毫米波檢測。
其實,此前的系統已經可以通過毫米波掌握前方第二輛車的行駛狀況。不過,當時是將重點放在了高精度測量與前方車輛間的相對速度上,因此“對來自前方第二輛車的反射波進行了除噪處理”(日產汽車)。









評論