墨尼黑理工開發高精度車距測量技術

慕尼黑理工大學近日基于先進駕駛輔助系統,并結合協作轉換器(cooperative transponder)開發出一種精確測量車距的方法。
新的測距方案即便在車載攝像頭的視野被擋住時也能夠起作用。
在系統運行過程中,行人與騎車者的手機將作為轉換應答器。車載定位系統計算這些“應答器”的移動軌跡,系統在檢測到“應答器”處于車輛前方時,將有駕駛輔助系統的相關功能對車輛進行緊急制動。

車載單元發送距離信息→攜帶“應答器”的道路使用者作為接收端→應答器解析車載單元的代碼并回饋→車載單元計算車距→最終發出警告或自動制動
該科研項目為慕尼黑理工大學Ko-TAG項目中的一部分,項目負責人Erwin Biebl教授指出,系統目前的水平是能夠在幾微秒內實現精確到厘米的定位。裝載與車內的定位系統將會持續地向應答器發送特殊代碼。而應答器在接受到這一信息后修正代碼序列并以更精確的時序模式作出反饋。
向司機發出警告、汽車系統自動制動等行為必須在行人或騎車者到達車輛前方之前就執行。同時,系統必須保證發出假警報的概率極低。研究人員表示,目前這項系統能夠將時間誤差控制在幾皮秒(十億分之一秒)之內,在根據車速換算誤差距離誤差,則僅為幾厘米。
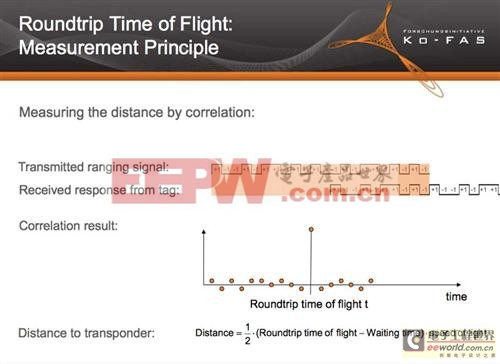
測距技術原理圖及計算公式
研究者還指出,應答器有兩種形式,一種是以智能手機為載體,另一種則是獨立的微型裝置,可以集成在人們的衣服上或包里。但考慮到現在幾乎人人都有手機,因此第一種方法則更為實用。根據慕尼黑理工大學透露,目前已經有一家大型手機制造商愿意與這項系統合作。
除了慕尼黑理工大學外,還有多家機構參與了該項目,例如大陸國際安全工程(Continental Safety Engineering International GmbH)、戴姆勒集團(Daimler AG)等等。









評論