豐田中研開發識別距離達80m的激光雷達

豐田中央研究所試制出了車載近紅外線激光雷達系統,配備在行駛的汽車上,可三維識別周圍的行人、汽車、建筑物及地形等,并在“第61屆應用物理學會春季學術演講會”(2014年3月17~20日于日本青山學院大學相模原校區舉行)上,公布了試制系統的實驗結果(演講編號:17p-E9-5)。
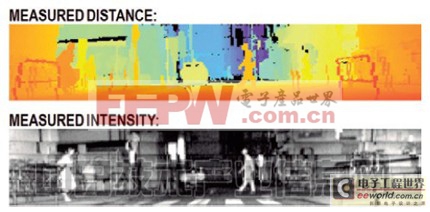
開發系統獲得的距離信息(上)和圖像(豐田中研在“ISSCC 2013”上公布的內容)
激光雷達是實現自動控制車速等的ACC(主動巡航控制系統)以及未來的自動駕駛要使用的核心技術。可由照射的激光及其反射光,實時三維識別周圍的形狀。還可與地圖信息對照,推斷當前位置。但目前能夠買到的產品十分有限。各公司開展的自動駕駛實驗大多使用美國Velodyne公司制造的激光雷達。豐田中研也曾利用Velodyne公司的產品進行過新一代駕駛系統的研究。
此次豐田中研使用的試制系統以6面反射鏡來掃描波長為870nm的激光(圖1)。該反射鏡既可將激光二極管的光向周圍發射,還可用于將對象物的反射光導入受光元件(光二極管)的光路控制。
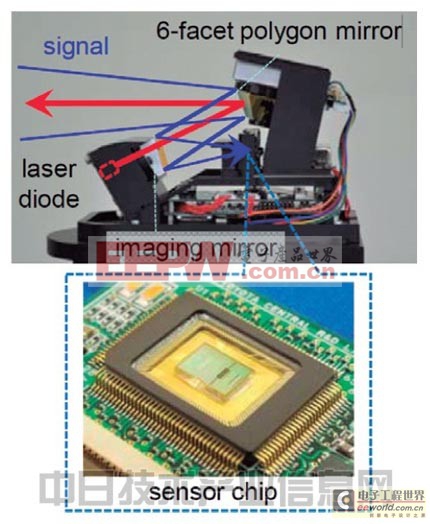
圖1:激光雷達的受光部多面反射鏡(上)和受光芯片。(照片由豐田中央研究所提供(《第61屆應用物理學會春季學術演講會演講預稿集》、p.25、2014年3月))
對象物的反射光用該公司開發的專用芯片接收,獲得二維圖像。距離信息通過手勢識別等使用的ToF(Time of Flight)方式來推斷的。
專用芯片集成有16列×1個的受光元件。使用該受光元件,通過多面反射鏡的1面來捕捉周圍空間的16列×202點。也就是說,通過圍繞多面反射鏡的6個面(1幀)來拍攝96列×202點。幀頻為10Hz。
專用芯片的受光部采用適于高靈敏化的雪崩光電二極管。因靈敏度提高,易受到會成為噪聲的陽光等干擾,因此還采取了消除噪聲影響的措施。具體為時空域直方圖處理:以24點(6×4)為1組,只有組內的多個點同時檢測到受光時,才視為接收到了激光反射光。受光元件和信號處理部集成在設計規則為180nm的CMOS芯片上。
經實驗確認,識別出了假想為穿著黑衣服的行人的板狀物體(寬30cm,反射率為9%)。反復進行了1000次的結果,80m以內的識別率達到90%以上。
另外,盡管光源使用的是激光,但據稱用為脈沖寬度為4ns的脈沖狀,達到了無損眼睛的安全標準。









評論