使用TI的Vision AccelerationPac,實現汽車可視探測

使用Vision AccelerationPac的圓形交通標志識別舉例
典型的視覺分析處理涉及幾個階段(如圖3所示),包括圖像預處理與特性檢測、相關物體識別、圖像與模式匹配,最后才是決策判斷。TI的Vision AccelerationPac最適合于減輕視覺分析處理前三個階段的密集計算。決策判斷通常包括分類器、浮點運算和矩陣轉換,C66x DSP內核對它們的處理最為有效。正因如此,Vision AccelerationPac在SoC中與一個或者多個DSP配對使用。結果是,把視覺分析工作量合理是劃分開來。
TI的TDA2x可實現低功耗、高性能的視覺處理系統。它擁有兩顆C66x DSP內核和一個Vision AccelerationPac,以及兩個嵌入式視覺引擎(EVE)。另外,它還包括一個視頻前端和汽車汽車聯網接口。下一頁的圖4顯示了TDA2xx SoC結構圖。
下面,我們來探討Vision AccelerationPac如何能夠加速ADAS圓形交通標志識別。
一些世界圓形交通標志使用紅色圓圈作為分界線,因此第一步便是從YUV422輸入數據只提取紅色像素。第二步是,計算水平和垂直梯度,使用亮度和對比度來確證紅色邊界線。然后,使用霍夫變換算法找出圓形。現在,使用數據庫中存儲的模式使圓形內被識別相關區域圖像關聯起來,以解釋交通標志(80 MPH),最終做出決策判斷。在這種情況下,結論是限速80英里/小時。
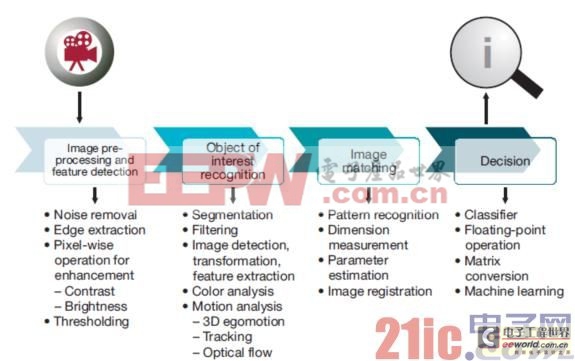
圖3視覺分析處理流程圖
如下面圖5所示,Vision AccelerationPac可以高效地分擔圓形交通標志識別處理的大多數工作量,包括基于互關聯的塊匹配模板加速器。DSP內核用于提高最終決策的穩健性。使用霍夫變換算法來查找圓形是一項高計算密集型工作,但使用Vision AccelerationPac時,霍夫變換算法查找圓形僅需140字節個代碼空間,約(1.88*NUM_RADIUS) +1.81 cyc/pix個處理時間周期,其中,NUM_RADIUS為我們在霍夫空間內選擇搜索的半徑數,因此它的視覺識別時間非常短,功耗非常低,并且硅片面積的性價比很高。以每秒30幀對一幅720 × 480圖像進行完全交通標志識別約需50 MHz,即小于10% EVE周期。保持了豐富的處理功能,表明一個EVE可以同時運行多個視覺算法。

圖4 TDA2x結構圖

圖5 使用Vision AccelerationPac實現圓形交通標志識別
機器視覺Vision AccelerationPac—汽車或者攝像頭處理以外的應用
Vision AccelerationPac可以使用的其它領域還有很多。除視頻攝像頭分析處理以外,Vision AccelerationPac的固點倍增器和硬件通道是雷達分析處理的理想選擇,因為它可以高效地處理快速傅里葉變換(FFT)和波束形成算法。利用Vision AccelerationPac來處理1024點FFT所花費的時間小于3.5μ秒。因此,雷達可用作汽車攝像頭系統的補充,以探測許多不同的交通和氣象狀況。
汽車視覺所使用的相同機制,也適用于許多其它機器視覺行業;工業自動化、視頻安全監控和警告系統、交通監控和車牌識別便是例子。Vision AccelerationPac可用于擴展DSP應用,以一種更加自主和高功效的方式來解決今天的許多視覺分析問題。
結論
Vision AccelerationPac是德州儀器創新型視覺分析解決方案。利用一種針對高效嵌入式視覺處理進行高度優化的靈活SIMD架構,Vision AccelerationPac擁有非常低的功耗和優異的硅片面積效率。Vision AccelerationPac與C66x DSP內核結合使用,可實現浮點和矩陣計算,從而極大地加速完整嵌入式視覺應用處理鏈。除是一種高效、可靠的架構以外,Vision AccelerationPac還使用一種簡單的基于C/C++的編程模型,輸出非常緊湊的代碼。它意味著,Vision AccelerationPac實現的系統具有非常低的內存占用,從而進一步降低了視覺系統成本和功耗。TDA2x SoC及其Vision AccelerationPac,是實現智能汽車系統、工業機器和“可視”機器人視覺分析的一個理想平臺,它們共同提高了我們的生活品質。
TDAx SoC更多詳情,請訪問www.ti.com/TDA2x。
參考文獻
(1) 谷歌在Va. Tech測試無人駕駛汽車
(2) 尼桑宣布史無前例的無人駕駛汽車發展計劃
作者:德州儀器 (TI) 戰略營銷經理Zhihong Lin、嵌入式視覺引擎首席架構師Jagadeesh Sankaran博士和技術戰略主任Tom Flanagan
鳴謝
感謝Stephanie Pearson、Debbie Greenstreet、Gaurav Agarwal、Frank Forster、Brooke Williams、 Dennis Rauschmayer、Jason Jones、Andre Schnarrenberger、Peter Labaziewicz、Dipan Mandal、 Roman Staszewski和Curt Moore給本文提供的支持。






評論