基于DELMIA/IGRIP的工業機器人仿真

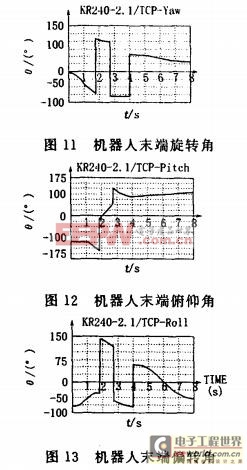
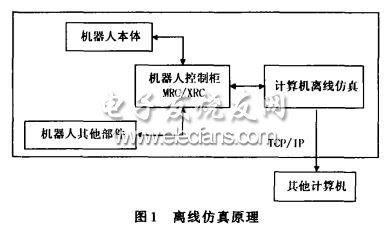
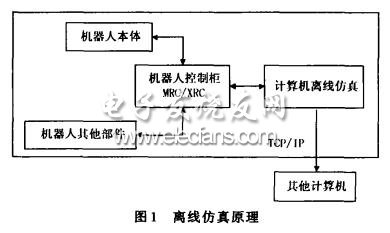
從DELMIA/IGRIP對工業機器人的仿真分析來看,我們很清楚地得到機器人關節空間的軌跡、機器人末端的空間軌跡及其姿態,并且利用DEL—MIA/IGRIP能避免機器人的碰撞。
3結束語
機器人的運動仿真是機器人技術的一個重要組成部分,機器人仿真也是機器人離線編程系統中十分重要的一環。應用DELMIA/IGRIP軟件的建模仿真模塊,成功解決了機器人在工作過程中無法直接觀察空間運動狀況的難題,是直觀方便地進行機器人仿真的有益嘗試。
參考文獻:
[1]北京賽四達科技有限公司.DELMIA公司及虛擬制造解決方案[z].2003.
[2]朱世強.王宣銀.機器人技術及其應用[M].杭州:浙江大學出版社,2600. 水位傳感器相關文章:水位傳感器原理





評論