基于DELMIA/IGRIP的工業機器人仿真

2.4運動學仿真分析
恨據機器人工作的特點,一般把饑器人各關節的軌跡,機器人末端的軌跡和機器人末端的位姿作研究對象,創建測量曲線,進行運動學仿真分析。產生測量曲線的方法:點擊“SimulationAnaly—sis"Fools”中的“DataReadout”;在彈出窗口點擊“Sensors”按鈕,并選擇相應的機器人;在彈出的“Sensormanagement”選擇需要測量的曲線,如各關節的軌跡、機器人末端的軌跡、機器人末端的位姿等;對機器人進行仿真,在“SpreadSheet”得到需要測量的一系列數值,點擊“Graphics”便得到所要的各個曲線。我們也可以在“Customizedcurves”來繪制其它關系曲線。
本文以KUKA240—2型搬運機器人為研究對象,對機器人的運動采用DELMIA/IGRIP進行了分析,得到機器人各關節的軌跡,如圖1~圖6所示,機器人末端的運動軌跡,如圖7~圖9所示,機器人末端的空間軌跡如圖10所示。
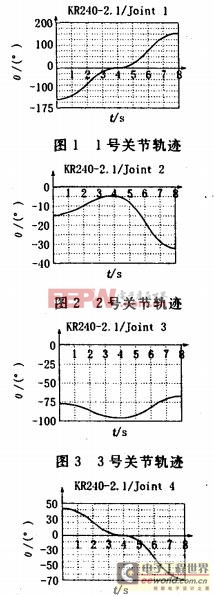
圖44號關節軌跡
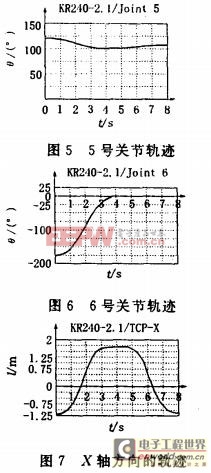
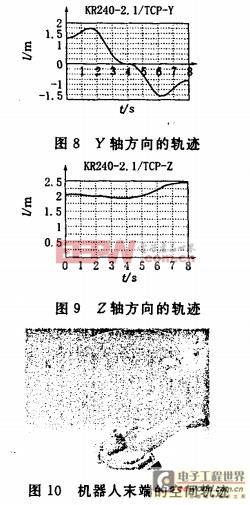
從圖中可以看出:機器人各關節在整個運動過程中的情況與所設定的初始條件吻合,整個曲線與各個工況運動一致。機器人末端的姿態一般用3×3的旋轉矩陣來表示,DELMIA/IGRIP采用RPY方法,用這種方法,通過3個量就可以表示機器人的姿態。仿真結果如圖11~圖13所示。 水位傳感器相關文章:水位傳感器原理





評論