三軸臺式工業機器人通用控制軟件設計

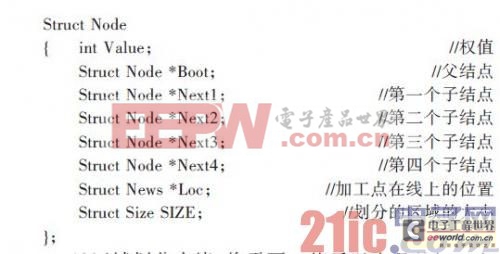
一旦區域劃分完畢,將需要一值予以表示其加工點的位置。采用結構體的形式予以表示,包括X,Y,Z三個坐標,表示其相對于所在結點空間的坐標。該結構體屬于環境單位結點的一部分,具體代碼如下:
Struct News
{int x;int y;int z;};
每一個環境單位結點都擁有自己的一個ID號,即該環境單位的大小及位置,具體代碼如下:
Struct Size
{int y;int z;int x;int Size;};
x,y,z分別是區域空間內該坐標軸上的最小值,Size表示該立方體區域的邊長。
4.2權值尋找
在路徑規劃上,采用權值尋找法。對每一個環境節點都進行一個權值的賦予,給予結點不同的優先級,權值越低,優先級越高,用于在路徑尋找中找到最優路徑。
例如,現有4個子節點A,B,C,D,給予A結點的權值為100,B結點的權值為80,C結點的權值為50,D結點的權值為10.現在在路徑規劃尋找最優路徑時,直接先尋找到D結點,然后繼續尋找下去,若出現多個優先級相同的結點時,則分而尋之,到尋找完畢之后,再進行最優路徑選取,可采用權值之和最小者優先的方法等[6].權值賦予的優先級按由高到低的順序排列為:存在加工點,靠近加工點,加工工件非加工點部分,其他區域。
實驗結果表明,采用上述路徑規劃選定的實際加工路徑與理想加工路徑依然存在著一定的差距。圖7為理想加工路徑,圖8為實際加工路徑。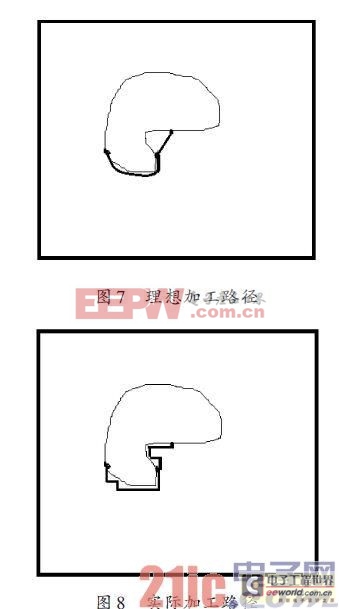
5總結
主站蜘蛛池模板:
修文县|
洛阳市|
饶平县|
唐山市|
当阳市|
务川|
偃师市|
兴仁县|
霍林郭勒市|
湘潭县|
瓦房店市|
松溪县|
平舆县|
丹江口市|
江门市|
祁门县|
新干县|
兰西县|
北宁市|
建平县|
汉中市|
会同县|
北安市|
安国市|
宾阳县|
利辛县|
陕西省|
鹤峰县|
兰坪|
汨罗市|
兴海县|
灌阳县|
SHOW|
鄢陵县|
布尔津县|
莱芜市|
浦北县|
宣汉县|
西宁市|
都匀市|
德令哈市|
本文通用控制軟件是在三軸臺式工業機器人的基礎上,以SmartPAC運動控制器為核心,通過改進后的柵格法進行模型建立,利用權值尋找法進行樹的遍歷尋找出一條最優路徑作為加工路徑。經實驗表明,該軟件基本達到軸式機器人定位要求,能實現簡單的路徑規劃,具備一定的通用性。針對大批量工業加工而言,軟件在加工工件的首次模型實現與路徑規劃上時間開銷較大,相比人為設定加工路徑要簡單、高效、便捷。





評論