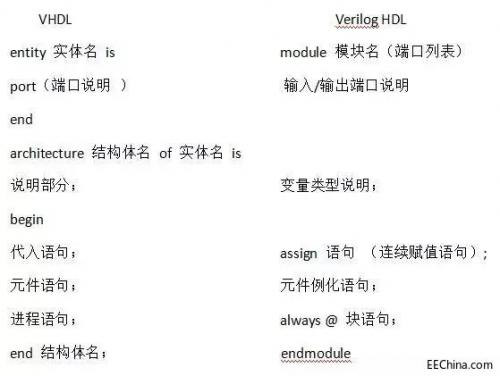
基于VHDL的多功能可變模計數器設計方案

值得注意的是,這里所設計的多功能可變模計數器具有如下特點:
(1)該設計的多功能可變模計數器具有多個功能控制端。因此各個控制端的優先權順序就成為設計的關鍵,經過理論分析和仿真調試,最終確認的優先權順序為:clr(清零)→clk(時鐘觸發)→s(置數)→en(使能)→updn(計數方向)。這個優先權順序可以有效地保證各個功能的完整實現,以及技術器的穩定運行。
(2)為了防止出現計數失控,大多數計數器采用給計數器增加一個復位控制端的辦法,當發現計數輸出q發生了計數失控時,通過復位控制端將計數器復位來排除計數失控。這種方法雖然有效,但是每次出現計數失控都要手動控制復位,給實際使用帶來了不便。該設計的多功能可變模計數器中,將當前的計數輸出q與當前的計數最大值m_temp進行比較,如果q比m_temp大,則強制將m_temp賦給q,這樣就可以自動避免計數失控,不必再增加手動的復位控制端。
3 仿真結果分析
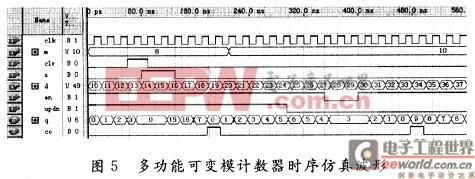
該多功能可變模計數器在QuartusⅡ開發環境下進行了仿真驗證,功能仿真波形如圖4所示,時序仿真波形如圖5所示。
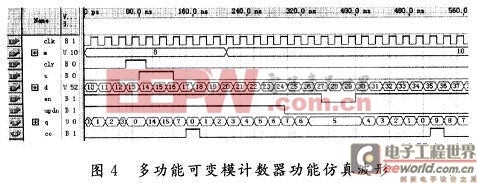
仿真結果分析如下:
(1)clk為時鐘信號,由時鐘信號的上升沿觸發計數;
(2)m為模值輸入端,當其變化時,計數容量相應發生變化;
(3)clr為清零控制端,當其為高電平時清零;
(4)s為置數控制端,當其為高電平時將置數輸入端d的數據加載到輸出端q;
(5)en為使能控制端,當其為高電平時正常計數,當其為低電平時暫停計數;
(6)updn為計數方向控制端,當其為高電平時計數器加法計數,當其為低電平時計數器減法計數。
4 結 語
這里所設計的多功能可變模計數器在QuartusⅡ開發環境下進行了仿真驗證后,下載到湖北眾友科技實業股份有限公司的ZY11EDA13BE實驗箱中進行了硬件驗證。該實驗箱使用ACEX1K系列EP1K30QC208芯片作為核心芯片.實驗證明設計正確,功能完整,運行穩定。另外,該設計的多功能可變模計數器可根據需要將模值的最大值由99進一步擴展,獲得更高的計數模值。
塵埃粒子計數器相關文章:塵埃粒子計數器原理








評論