基于FPGA的磁浮軸承控制系統(tǒng)的設(shè)計(jì)與研究

由于有電磁力F∝i(t)2/x(t)2,其中i(t)為激磁電流,x(t)為對(duì)應(yīng)氣隙,因此,要使轉(zhuǎn)子穩(wěn)定懸浮在平衡位置,必須滿足f=F-mg=0。假設(shè)輸入初始電流為i0,轉(zhuǎn)子與電磁鐵間的氣隙為x0,如將轉(zhuǎn)子作為單質(zhì)點(diǎn)總集中質(zhì)量來處理,那么,當(dāng)轉(zhuǎn)子質(zhì)心在Y方向上有向上的偏移量X時(shí)(轉(zhuǎn)子僅存在平移,無干擾力存在),其轉(zhuǎn)子的中心運(yùn)動(dòng)方程可表示為:

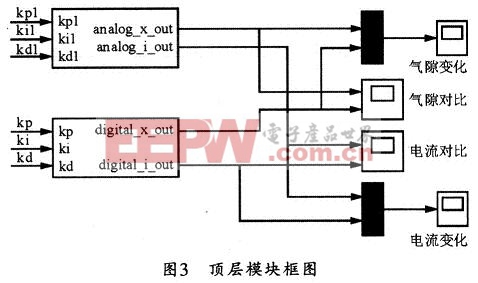
事實(shí)上,軸向磁鐵和徑向磁鐵具有相同的線性化數(shù)學(xué)模型,只是電流剛度和位移剛度不同,因此,軸向和徑向可采用相同的控制方法。
在
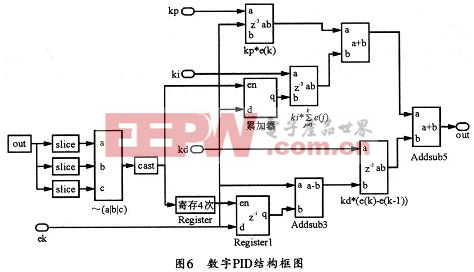
在本系統(tǒng)的仿真中,其數(shù)字PID使用xilinx提供的模塊集(blockset)構(gòu)建而成,如圖6所示。
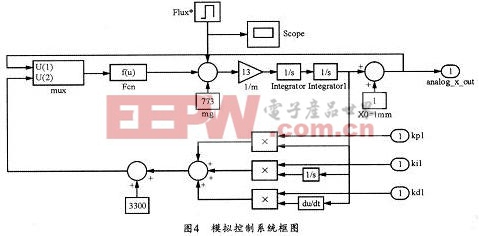
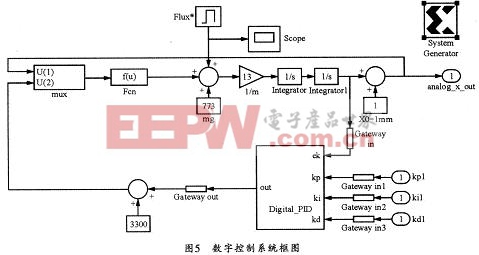
上述仿真中,偏磁電流i0為3.3 A(為仿真方便,取3.3 A并擴(kuò)大1 000倍),平衡氣隙x0為1mm,磁極的截面積S為10 500 mm2,電磁線圈匝數(shù)為150匝,真空磁導(dǎo)率μ0為4π×10-7 Vs/Am,另外,取:mg=733 N,1/m=0.013(為仿真方便,擴(kuò)大1000倍),kp=8 800,ki=18.5,kd=1 000 000,kp1=9 000,ki1=220 000,kd1=50,T=2×10-5。

pid控制器相關(guān)文章:pid控制器原理












評(píng)論