PSoC微處理器在電動(dòng)車無刷電機(jī)控制器上的應(yīng)用

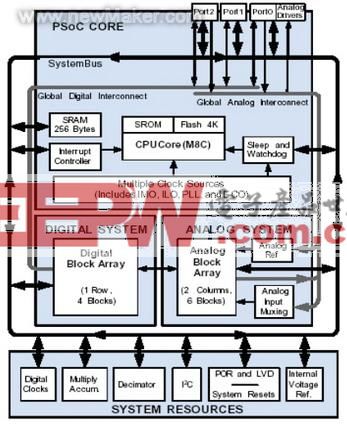
4. 通用I/O
PSoC微控制器的通用I/O數(shù)量從*4位不等,具體根據(jù)不同型號(hào)來確定。每個(gè)I/O功能可編程選擇。在輸出模式中可選擇輸出驅(qū)動(dòng)方式,模擬輸出驅(qū)動(dòng)可達(dá)40mA。通過內(nèi)部上拉或者下拉電阻輸出,強(qiáng)輸出,可設(shè)置輸出最大的驅(qū)動(dòng)電流達(dá)25mA。所有引腳都能作為中斷電源,通過引腳信號(hào)變化產(chǎn)生中斷。并可選擇位上升沿觸發(fā)終端、下降沿觸發(fā)。引腳能與模擬模塊相連。此外,還有用作斯密特觸發(fā)器的TTL、I/O。
5. 振蕩器
PSoC系列器件有多種振蕩器可供選擇,總能為CPU時(shí)鐘、模擬PSoC模塊和數(shù)字PSoC模塊的時(shí)鐘,找到合適的振蕩器。主要有內(nèi)部達(dá)到24/48MHz的主振蕩器、一個(gè)32.768MHz外部晶體振蕩器和內(nèi)部低速振蕩器。主振蕩器誤差為±2.5%,且沒有外部補(bǔ)償,外部晶體振蕩器可對(duì)PLL選定精度,內(nèi)部低速振蕩器一般作為PSoC模塊和看門狗/睡眠定時(shí)器的時(shí)鐘。可使用時(shí)鐘分頻器,從而優(yōu)化代碼執(zhí)行速度和減少功耗。
6. 專用外設(shè)
PSoC系列器件還提供一些專用外設(shè),包括看門狗/睡眠模式時(shí)鐘(Watchdog/Sleep Timer)、可設(shè)定電壓閥值的電源低電壓檢測(cè)(LVD/POR)、中斷控制器、采樣抽取器(Decimator)、片內(nèi)溫度傳感器和片內(nèi)電壓參考等。
7. 靜態(tài)COMS器件
PSoC微處理器系列運(yùn)用了先進(jìn)Flash工藝的全靜態(tài)CMOS器件,實(shí)現(xiàn)高度低電壓功能。通常電壓保持在3.0到5.5V DC,使用片內(nèi)開關(guān)式電壓汞可使工作電壓降低到1.0V DC,工作于-40℃~+85℃。
電動(dòng)車無刷控制器系統(tǒng)
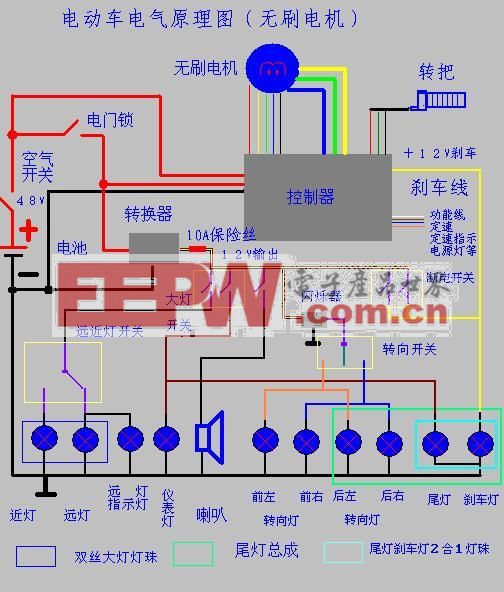
由CY8C24423構(gòu)成的電動(dòng)車無刷控制器系統(tǒng)原理框圖如圖2所示。
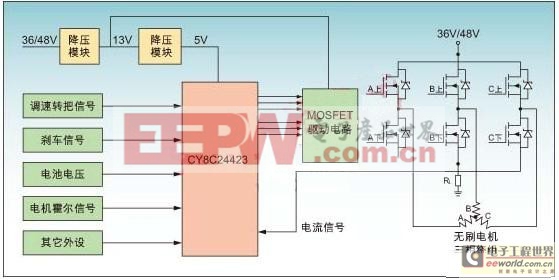
圖2:電動(dòng)車無刷控制器系統(tǒng)原理框圖。
要讓圖中所示的電機(jī)轉(zhuǎn)動(dòng)起來,首先控制部就必須根據(jù)電機(jī)霍爾感應(yīng)到的電機(jī)轉(zhuǎn)子目前所在位置,然后決定開啟(或關(guān)閉)MOSFET的順序,如上圖中之A上、B上、C上(這些稱為上橋功率晶體管)及A下、B下、C下(這些稱為下橋功率晶體管),使電流依序流經(jīng)電機(jī)繞組線圈產(chǎn)生順向(或逆向)旋轉(zhuǎn)磁場(chǎng),并與轉(zhuǎn)子的磁鐵相互作用,如此就能使電機(jī)順時(shí)/逆時(shí)轉(zhuǎn)動(dòng)。當(dāng)電機(jī)轉(zhuǎn)子轉(zhuǎn)動(dòng)到霍爾傳感器感應(yīng)出另一組信號(hào)的位置時(shí),控制器又再開啟下一組MOSFET,如此循環(huán)電機(jī)就可以按同一方向繼續(xù)轉(zhuǎn)動(dòng),直到控制器決定要電機(jī)轉(zhuǎn)子停止,此時(shí)則關(guān)閉MOSFET,要電機(jī)轉(zhuǎn)子反向則MOSFET開啟順序相反。
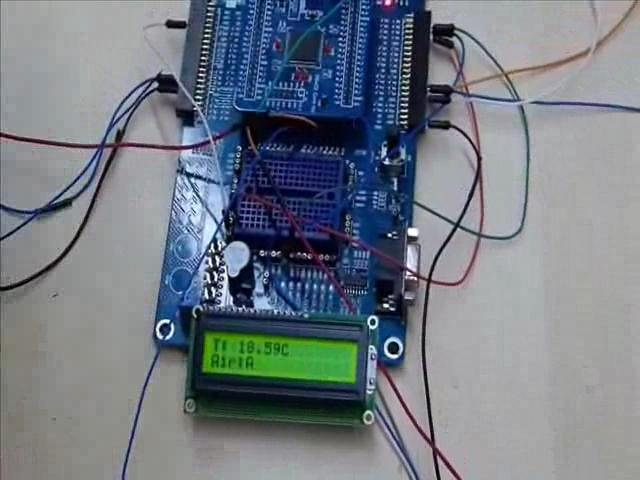
一個(gè)最基本的電動(dòng)車用無刷電機(jī)控制器所需要實(shí)現(xiàn)的功能包括除了轉(zhuǎn)把調(diào)速外,還應(yīng)該包括欠壓保護(hù),過流保護(hù),剎車斷電等。另外近年來還有一些實(shí)用且流行的功能如定速巡航、ABS剎車再生制動(dòng)、1:1助力等等。從上面的原理框圖可以很清楚地看出,整個(gè)系統(tǒng)只用了一個(gè)PSoC芯片便實(shí)現(xiàn)了上述的所有控制功能。圖3為本文設(shè)計(jì)的無刷控制器半成品實(shí)物圖。

圖3:電動(dòng)車無刷電機(jī)控制器半成品實(shí)物外形圖。








評(píng)論