基于FPGA/MCU結構的線性調頻高度表設計

1 引言
無線電高度表不僅可以精確測量飛行器與地面或海面的相對高度,而且還可以測量地表 粗糙度、海洋波浪高度等多種參數,在飛機的自動著陸、自動導航、地形匹配等領域得到了 廣泛的應用。無線電高度表主要分為調頻連續波體制和脈沖體制兩種,調頻連續波體制適合 1500m 以內的低高度應用,脈沖體制適合1500m 以上的中高高度應用。本文介紹了一種基于 FPGA/MCU 結構的線性調頻(LFMCW)連續波高度表,具有精度高,結構簡單,可靠性高,成 本低等特點。
2 工作原理
線性調頻連續波高度表的基本原理為[2]:采用三角波線性調頻微波振蕩源,經發射天線 輻射等幅調頻波,經過與飛行器飛行高度成正比例的時間延遲τ,由地面發射并被接收天線接 收,經混頻后輸出差拍信號fb,該信號經窄帶濾波器選頻后,被一個增益隨高度變化的放大 器放大、濾波,送到跟蹤鑒頻器。跟蹤鑒頻器輸出高、低電平表示差拍信號是否進入跟蹤帶 內,控制單元根據保持或調整三角波的斜率,使差拍信號始終落入跟蹤帶內,保持恒定值。 整個系統通過地面構成閉環,飛行器的高度由三角波的斜率和最大頻偏Δf 來決定。
其主要性能指標為:
工作頻率:C 波段
體制:LFMCW(線性調頻連續波)
測高范圍:0?1500m
距離分辨率:1m
高度數據接口:RS422,9600 波特率
該高度表屬于收發天線分開、三角波調頻、頻譜前沿跟蹤、恒定差拍式無線電高度表,其工作原理如圖1 所示。
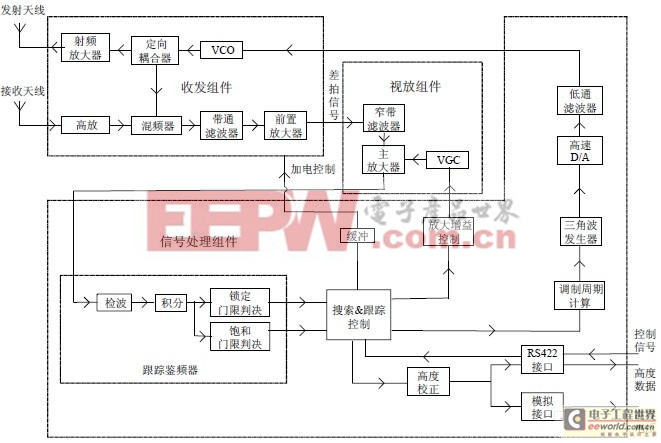
圖1 線性調頻高度表工作原理圖 上圖中,三角波發生器輸出信號的幅度是一個常數,而其斜率是控制電壓的函數。在測 高過程中,通過測高回路自動校正,使調制信號的斜率隨高度而變化,以保持差拍恒定。變 化規律是高度升高,斜率增大;高度降低,斜率減小。跟蹤鑒頻器判別差拍信號fb 是否進入 跟蹤帶內,如是則輸出鎖定信號。跟蹤鑒頻器的中心頻率為225kHz,帶寬僅為30kHz 左右, 使高度表有較高的抗噪聲和抗干擾的能力。在沒有跟蹤鎖定信號時,高度表進入搜索狀態, 變化三角波的斜率,從最低高度到限制的最高高度周期地掃描,并根據跟蹤鑒頻器是否輸出 鎖定信號進行調整。當調制斜率對應飛行高度時跟蹤鑒頻器輸出高電平,高度表環路鎖定并 保持跟蹤地面發射的信號。
接收、發射天線選用微帶集成平板天線,天線間距不小于1m,使收發隔離度大于70dB。 天線的3dB 帶寬為300MHz,旁瓣電平不大于-12dB,駐波比S=2,效率η≈80,總尺寸不大于 15cm×15cm。
收發組件采用自差結構,輸出為零中頻的差拍信號,其頻率跟地面高度成正比。VCO 的 調制帶寬最高可達200MHz,調制線性度優于1.2。組件的接收增益30dB,噪聲系數3.5dB。 視放組件對差拍信號進行選頻放大,總增益不低于80dB,增益控制范圍不低于90dB。
選頻濾波器為定制的機械濾波器,中心頻率225kHz,帶寬30kHz。主放大器選用AD 公司的視 頻放大器AD*,它內部集成了兩個放大器模塊,可以單獨使用其中的任何一個或將兩個級 聯使用以提高增益和擴大動態范圍,每個放大器模塊的增益最大可達54.4dB,增益控制范圍 48.4dB。







評論