多傳感器校準在自動駕駛汽車中如何工作?

自動駕駛汽車中高級駕駛輔助系統 (ADAS) 的多傳感器校準通過將各種傳感器(如攝像頭、LiDAR 和雷達)對齊到一個統一的坐標系中,實現精確的感知和定位,從而確保準確的數據融合。
本文引用地址:http://www.104case.com/article/202506/471871.htm本文回顧了 ADAS 多傳感器標定的類型和技術。
ADAS 傳感器校準結合了單個傳感器的內在考慮因素和系統級外在因素。本征校準考慮了一般因素,例如線性度、輸出斜率和偏移,以及傳感器特定的規格。傳感器特定因素的示例包括:
攝像頭 — 焦距、鏡頭畸變、分辨率、高動態范圍 (HDR)、鏡頭聚焦速度、高靈敏度、低照度性能、LED 閃爍緩解(以最大限度地減少交通信號燈的影響)和低延遲。
LiDAR — 激光束角、視場 (FOV)、掃描速率、測距精度、角度分辨率和內部坐標系。
雷達 — 天線增益、頻率、脈沖特性、范圍、視場角、分辨率、測速精度以及檢測各種類型物體/材料的能力。
Extrinsic calibration 檢查傳感器之間的空間關系,包括平移和旋轉。它涉及校準相機、LiDAR 和雷達,以確保它們的坐標系對齊。例如,它可以驗證對象級跟蹤以及如何使用磁道級融合方案來融合數據。
ADAS 系統的外在標定可以結合使用基于目標和無目標的方法,或者只采用無目標技術來實現。
基于目標的校準
基于目標的校準(也稱為受控環境校準或靜態校準)使用具有特定形狀和大小的目標在指定距離內校準 ADAS 傳感器在靜態設置中的性能。
靜態 ADAS 校準需要特定的照明條件并且沒有反射表面,以避免傳感器混淆。校準目標用于校準和校準傳感器(圖 1)。

圖 1.典型的基于目標的 ADAS 標定系統。圖片來源:John Bean)
基于目標的 ADAS 校準的高度受控條件支持高精度校準。然而,使用受控環境也是一個限制,因為 ADAS 通常在道路上不受控制的環境中運行。因此,基于目標的 ADAS 標定通常與無目標標定結合使用。
無目標校準
基于目標的 ADAS 標定的局限性源于三種傳感器模式提供的多種數據類型。攝像頭生成 2D 圖像,LiDAR 生成密集的 3D 點云,雷達提供稀疏的 4D 點云,其中第四維表示物體的速度。
通過將掃描工具連接到汽車的計算機并以指定速度行駛、跟隨其他車輛并在明確標記的道路上導航,可以實現無目標校準。掃描工具可檢測物體和道路標記,并使用算法根據實際環境校準傳感器。
提出了一種基于自我監督學習 (SSL) 和深度神經網絡的新無目標校準方法。在這種方法中,信號的一部分用于預測信號的另一部分。它已用于對雷達陣列進行超分辨率、對相機幀進行上采樣或激光雷達測量,以改善校準結果。
在圖 2a 中,顯示了基于 SSL 的相機激光雷達校準。投影的激光雷達點云(按范圍著色)和相機圖像在左側圖像中明顯未對齊;但是,可以使用 SSL 對齊它們,如右圖所示。
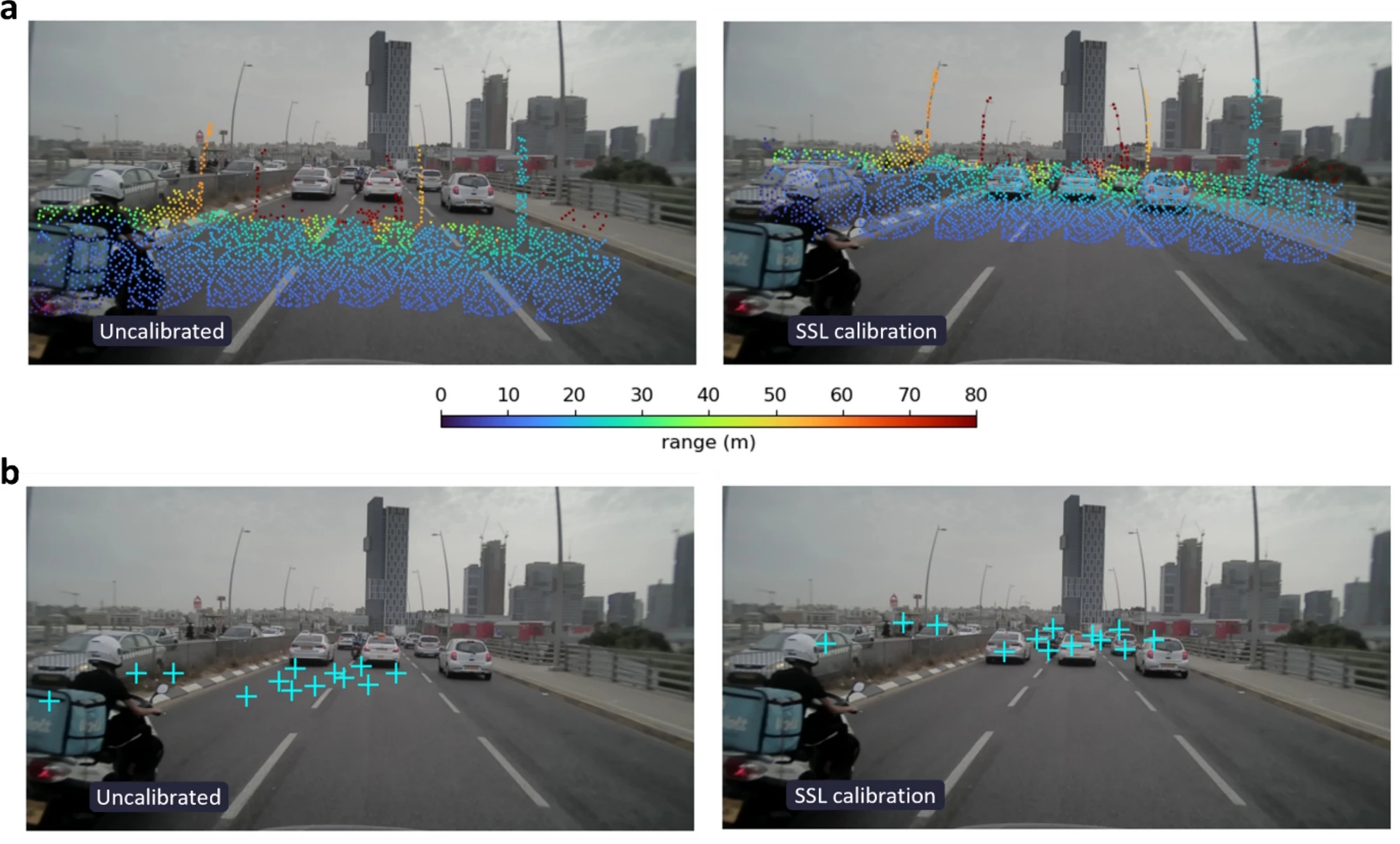 圖 2.使用 SSL 進行相機-激光雷達校準(上)和相機-雷達校準(下)的示例。(圖片:Scientific Reports))
圖 2.使用 SSL 進行相機-激光雷達校準(上)和相機-雷達校準(下)的示例。(圖片:Scientific Reports))
圖 2b 說明了攝像頭-雷達校準。校準前,由青色“+”標記表示的雷達與左側圖像中移動的車輛未對準。SSL 可用于校準攝像頭雷達傳感器并對齊其輸出,如右圖所示。
總結
ADAS 很復雜,具有多種傳感器模式,需要不同類型的內在和外在校準。此外,整個 ADAS作需要多模態校準,結合使用基于目標和無目標的校準方法。最近,SSL 技術已應用于無目標 ADAS 傳感器,以提供更好的校準結果。







評論