漫談自動駕駛激光雷達和新型探測技術

說到“雷達”,小伙伴們的腦海里大概立馬能蹦出戰爭片中“報告長官,雷達上發現敵艦靠近!”這樣的對白。這里所謂的“雷達”(Radar)一般是指利用電磁波探測目標的電子設備,全稱是Radio DetecTIon and Ranging,無線電探測和測距,很多人也叫它“無線電定位”。
本文引用地址:http://www.104case.com/article/201710/367436.htm不過,接下來我們要介紹的并不知道我們熟悉的這個“雷達”概念,而是利用光來進行探測和定位的手段——“激光雷達”。
什么是激光雷達?
如今,“激光雷達”已不是什么陌生的概念了,特別是隨著自動駕駛的熱潮,它也備受矚目。

激光雷達實際上是一種工作在光學波段(近紅外)的雷達,最早對它的定義是LIDAR,即 Light DetecTIon and Ranging。不過,更準確的應該是“LADAR”這種叫法,即Laser DetecTIon and Ranging,激光探測和測距。
特點
與同樣在汽車中有著一定應用的微波雷達相比,工作在光學波段的激光雷達其頻率比微波高2-3個數量級以上,有著更高的距離分辨率、角分辨率和速度分辨率。因此,激光雷達在測量過程中可帶來距離、角度、反射強度、速度等更豐富的信息,憑借這些數據便可生成目標多維度的圖像,協助我們或系統對探測目標擁有更詳細的認知。
另外,由于激光波長短,能發射發散角非常小(μrad量級)的激光束,多路徑效應小,即不會形成定向發射,與微波或者毫米波產生多路徑效應,抗干擾能力強,可實現低空、超低空目標的探測。而激光主動探測擁有不依賴于外界光照條件或目標本身輻射的特性,只需通過探測自身發射的激光束的回波信號來獲取目標信息,所以還可實現全天候的工作。不過,激光雷達易受大氣條件以及工作環境的煙塵影響,要實現全天候的工作環境在目前來講還是最困難的事情。
原理
實際上,激光雷達技術的前提是激光測距技術。我們通常能見到的測距方法,從大類上可以分為:激光飛行時間(TIme of Flight,TOF)法和三角法。簡單來講,它們分別適用于長距離測距和短距離測距。
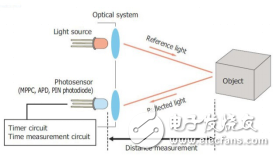
TOF測距原理示意
而TOF法又可分為:
a)脈沖調制(脈沖測距技術),利用被測目標對光信號的漫反射來測距;
b)相位調制,對激光連續波進行強度的調制,通過相位差來測量距離信息。
而激光雷達對不同方法的選擇主要取決于它的種類和實際應用。
分類
激光雷達也分很多類別。從調制出發,目前主要有直接探測激光雷達和相干探測激光雷達。現在常見的,包括自動駕駛、機器人、測繪所用的,基本上屬于直接探測激光雷達。比較特殊的,比如測風、測速之類的雷達,則一般采用的是相干調制。

直接探測類型的激光雷達應用

中國海洋大學研發的車載多普勒測風激光雷達
圖片來源:qingdaonews.com
如果從應用出發,那分類就較多了,比如激光測距儀、激光三維成像雷達、激光測速雷達、激光大氣探測雷達等等。其中,激光三維成像雷達就包含了我們熟知的激光測繪,以及自動駕駛中的單線激光雷達和多線激光雷達。
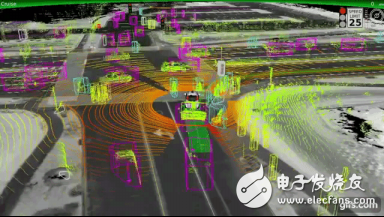
自動駕駛中激光雷達是什么樣子?
正如上文提到的,在目前的自動駕駛中,有單線激光雷達和多線激光雷達之分。由于在應用中需要很高的采樣頻率,在近距離和遠距離測量中則分別用到三角測距法和脈沖測距法。
其中,單線激光雷達主要通過一個高重頻脈沖激光測距儀,加上一個一維旋轉掃描來實現測量。而它的角分辨率可高于多線激光雷達,所以在行人探測、障礙物探測(小目標探測)以及前方障礙物探測等方面上,比多線激光雷達具有更多優勢。多線方案目前也主要為多路單線集合而成,因而還受到體積和光路的限制。

“長”在自動駕駛汽車頭上的激光雷達系統
圖片來源:souhu.com
這里可能有人會問了:“除了避障,為什么還要用激光雷達來做車道檢測,而不直接使用相機?ADAS 算法不已非常成熟了嗎?”
原因很簡單,相機特別容易受到背景光或者強光的干擾。比如,行駛在林蔭大道時,樹蔭落下斑斑點點的陽光,再結合白色車道線,相機就很難辨識,而識別概率的低下則將造成算法的復雜化。

相機:哪位小仙女闊以告訴我,車道線在WHERE?!
ADAS算法:……
那么,用激光雷達來做車道檢測又有什么好處呢?
首先,激光雷達用的是紅外激光,這種激光本身在紅外波段的輻射比可見光要低得多。再者,應用中會利用一個非常窄的濾光片,直接將強背景光濾除,然后再用紅外光進行探測。這樣我們就能獲得一張超高質量的車道線圖像,通過圖像的灰度,就能輕松的把車道線檢測出來。總體來說,用激光雷達做車道線檢測,性能會比相機更優。
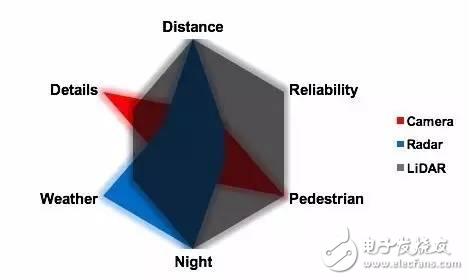
相機、雷達和激光雷達的比較
圖片來源:toutiao.com
激光雷達和一個了不起的新伙伴
針對單線和多線激光雷達,高速、高增益且在近紅外波段高靈敏度的單點探測器APD(雪崩二極管)是目前探測端的首選。該器件的探測帶寬普遍在百MHz左右,且在高壓工作時有幾十倍的增益,能夠大幅增強光電信號。然而,在百米量級的探測中,APD所能達到的增益效果仍然不能滿足需求。
于是,自動駕駛激光雷達急需一個全新小伙伴的出現。這個小伙伴需要擁有更大的增益,且工作在近紅外光范圍。

Wanted!!!(圖)
不過,隨著MPPC的誕生,自動駕駛激光雷達也看到了新的曙光。
MPPC是一種俗稱硅光電倍增管(Silicon Photomultiplier,SiPM)的新型光半導體器件,根據其原理可稱多像素光子計數器(Multi-Pixel Photon Counter,MPPC)。其由多個工作在蓋革模式的APD陣列組成,具有高增益、高探測效率、快速響應、優良時間分辨率和寬光譜響應范圍等特點。

當MPPC中的一個像素接收到一個入射光子時,就會輸出一個幅度一定的脈沖,如圖顯示,多個像素如都接收到入射光子,則每個像素都會輸出一個脈沖,這幾個脈沖最終會疊加在一起,由一個公共輸出端輸出,以此達到更大的增益。
相比APD,MPPC的增益可達到105-106,這樣在理論上,可以在更短的時間內得到更長的距離信息,探測帶寬也與APD不相上下。另外,擁有小有效面積、更多像素結構的MPPC不僅具備較快的時間特性(上升時間僅1ns左右),還可利用它獨特的光子分辨能力,將不同表面反射率的物體識別出來,從而達到測距同時分辨物體表面特性的目的。從這些性能上來看,MPPC非常適合脈沖測距法的應用,是自動駕駛上一維激光雷達的理想小伙伴。
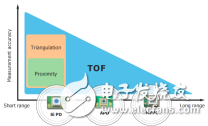
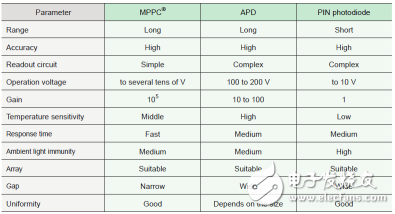
MPPC、APD和PIN光電二極管的比較
除了高性能以外,想真正成為激光雷達的伙伴,應用的MPPC器件還必須工作在近紅外光范圍內,然而這并不是一件容易的事。
一方面,MPPC一般都是P-on-N的半導體結構,而近紅外需要N-on-P的半導體結構;另外更重要的一點,就是硅基材料要做到近紅外波段是非常困難的,再加上各方面的工藝問題,如今研制成功且實現可量產的案例少之又少。
然而,隨著2017年初美國西部光電展(Photonics West)的開幕,一則關于近紅外MPPC的好消息傳來了!
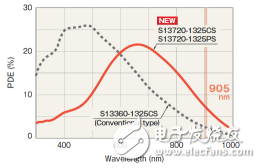
濱松公司發布了最新的近紅外MPPC研制成果,推出了紅外增強型MPPC S13720-1325系列。其在905nm處具有較高的探測效率,響應速度快,工作溫度范圍寬,適合各種場合下的激光雷達應用,尤其是使用TOF測距法的長距離測量。現在,也已正式向全球市場開放供應。
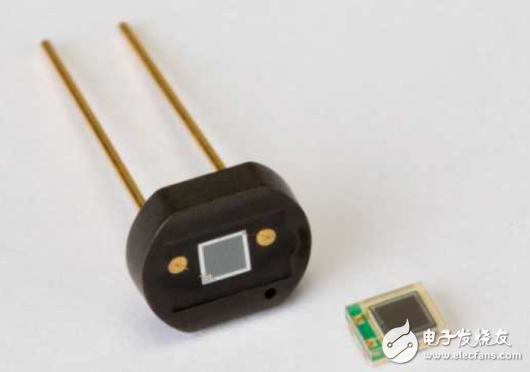
濱松近紅外MPPC S13720-1325系列
自動駕駛如今是一個炙手可熱的話題,但是,真正將熱點變為大眾日常生活的一部分,行業中的創造者們可能還有一段曲折的路要走。其中,激光雷達作為自動駕駛核心技術之一,也是他們必經的挑戰。
而濱松對近紅外MPPC技術的攻克,意味著的不僅只是一次半導體技術的突破,還是一次自動駕駛激光雷達技術大步跨躍的可能。讓我們寄期待于這位新伙伴,為自動駕駛帶來更好的未來吧!








評論