基于SOPC的簡(jiǎn)易運(yùn)動(dòng)控制芯片方案

現(xiàn)在的運(yùn)動(dòng)控制器已經(jīng)發(fā)展到了以專(zhuān)用芯片(ASIC)或FPGA作為核心處理部件的開(kāi)放式運(yùn)動(dòng)控制器。這樣的解決方案突出的特點(diǎn),是讓運(yùn)動(dòng)控制的處理部分以獨(dú)立的、硬件性方式展開(kāi),增加系統(tǒng)的性能和可靠性,從而有效地解決了以單純的MCU或DSP系統(tǒng)的處理帶寬限制,以及用戶系統(tǒng)軟件和運(yùn)動(dòng)控制軟件混雜性的問(wèn)題。
業(yè)界也早已出現(xiàn)了各種類(lèi)型的運(yùn)動(dòng)控制專(zhuān)用芯片,雖然有較高的功能、性能,但一般都比較復(fù)雜,使得客戶應(yīng)用起來(lái)非常困難。
用戶們常常需要一種容易使用的運(yùn)動(dòng)控制芯片與通用MCU/CPU結(jié)合起來(lái)的系統(tǒng)方案,用以面向更一般性的或中低端的應(yīng)用場(chǎng)合。這樣的方案里,運(yùn)動(dòng)控制芯片部分可以擔(dān)當(dāng)關(guān)鍵的馬達(dá)控制信號(hào)發(fā)生功能,又可以擁有較高的性能和其他的系統(tǒng)性接口資源(若是利用8253/8254之類(lèi)的計(jì)數(shù)器,就顯得捉襟見(jiàn)肘,計(jì)數(shù)長(zhǎng)度太短,且沒(méi)有其他資源);而在MCU/CPU部分可以通過(guò)一些簡(jiǎn)單的控制指令完成對(duì)馬達(dá)運(yùn)動(dòng)的控制,更多的資源用來(lái)處理系統(tǒng)界面或應(yīng)用軟件。
簡(jiǎn)單而言,就是需要一個(gè)方案有效地協(xié)調(diào)了運(yùn)動(dòng)控制系統(tǒng)的軟硬件的分工,軟件部分方便客戶開(kāi)發(fā),硬件部分確保系統(tǒng)性能。
深圳市斯邁迪科技發(fā)展有限公司(Smarteer)推出的SM1000系列SOPC運(yùn)動(dòng)控制芯片就是上述需求的解決方案。它是在高性能系列運(yùn)動(dòng)控制FPGA/芯片—SM5000方案后,經(jīng)過(guò)不斷的技術(shù)積累和市場(chǎng)調(diào)查后,特地為中低端市場(chǎng)應(yīng)用推出的。
SM1000是一個(gè)簡(jiǎn)易的運(yùn)動(dòng)控制芯片系列,它提供長(zhǎng)達(dá)32位的可編程計(jì)數(shù)和脈沖發(fā)生的功能,脈沖頻率可以高達(dá)10M赫茲以上,同時(shí)在芯片內(nèi)部增加了許多系統(tǒng)性的資源,比如:內(nèi)置3-8譯碼器、地址鎖存器、矩陣鍵盤(pán)掃描接口和通用I/O等。由于芯片是SOPC技術(shù)方案,因此還可以根據(jù)客戶的具體需求做定向化的設(shè)計(jì)。
SM1000簡(jiǎn)易而又方便于客戶應(yīng)用,它面向更廣泛、更一般的運(yùn)動(dòng)控制應(yīng)用領(lǐng)域。利用它結(jié)合MCU/CPU可以便捷地組建成一個(gè)運(yùn)動(dòng)控制系統(tǒng),尤其是一些嵌入式、系統(tǒng)集成的應(yīng)用系統(tǒng)。
SM1000非常適合于獨(dú)立多軸的馬達(dá)控制場(chǎng)合,同時(shí)結(jié)合控制軟件也可以非常靈活地實(shí)現(xiàn)常見(jiàn)的加減速運(yùn)動(dòng)控制,甚至多軸聯(lián)動(dòng)控制。
以下是SM1000系列芯片技術(shù)特點(diǎn)和應(yīng)用介紹。
一、SM1000芯片方案的技術(shù)指標(biāo)
⑴ 輸入時(shí)鐘CLK頻率最高到78MHz;
⑵ 1-4路32位計(jì)數(shù)器,可達(dá)計(jì)數(shù)范圍為:1~ 2,147,483,647;
⑶ 1-4路32位直接脈沖分頻器,可設(shè)置頻率系數(shù)范圍為:1~ 2,147,483,647;
⑷ 1-4路正/反向脈沖輸出,可接成差分輸出;
⑸ 1-4路正/反向脈沖輸出有效指示,可接成差分輸出;
⑹ 最高輸出脈沖頻率為:CLK/64(SM1001不同);
⑺ 其他功能:
a) 內(nèi)置3-8譯碼器,輸出7個(gè)附加片選信號(hào);
b) 8通用輸入+8通用輸出;
c) 可接8x8矩陣鍵盤(pán),直接讀取按鍵編碼/有效值;
d) 8位數(shù)據(jù)接口(內(nèi)置地址鎖存,可以直接接MCS51 CPU)。
二、SM1000系列規(guī)格 
三、SM1000功能框圖 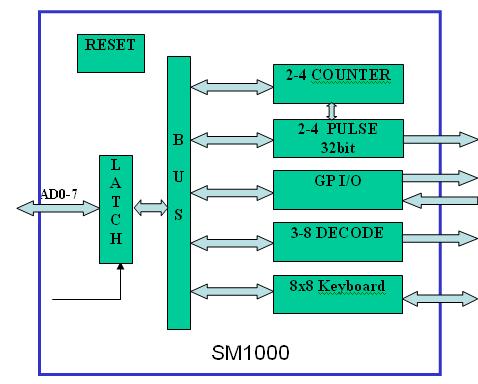
圖1. SM1000功能框圖
1. 復(fù)位
2. 鎖存
3. 總線
4. 2-4路計(jì)數(shù)器
5. 2-4路32位脈沖分頻器
6. GPIO
7. 3-8譯碼器
8. 8x8矩陣鍵盤(pán)
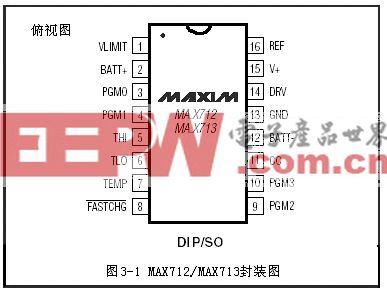
四、功能引腳介紹 
五、應(yīng)用方向舉例
1. 步進(jìn)馬達(dá)控制器
2. 輕紡設(shè)備:縫紉機(jī)/繡花機(jī)等
3. 機(jī)器手/臂
4. 空間座標(biāo)測(cè)量/定位系統(tǒng)
5. 經(jīng)濟(jì)型通用運(yùn)動(dòng)控制器
6. 鉆孔、銑邊設(shè)備
7. 其他
六、編程應(yīng)用介紹
A、CPU接口
該芯片采用通用8051 8位地址/數(shù)據(jù)復(fù)用接口。由于芯片內(nèi)置了地址鎖存器,因此可以直接與8051單片機(jī)地址/數(shù)據(jù)總線相連,而不需要通過(guò)地址鎖存器分離出地址和數(shù)據(jù)總線。另外,該芯片內(nèi)置了一個(gè)3-8譯碼器,可以輸出7個(gè)片選信號(hào),以供用戶擴(kuò)展地址譯碼用。這樣,極大地方便了用戶基于8051單片機(jī)的應(yīng)用系統(tǒng)設(shè)計(jì)。整個(gè)接口只需要14根線。包括:
a) 8根地址/數(shù)據(jù)總線:AD0~7
b) 3根片選線:CS1~3
c) 1根地址鎖存允許線:ALE
d) 1根讀允許線:RD_n
e) 1根寫(xiě)允許線:WR_n
輸出7根片選線,地址劃分見(jiàn)地址分配表。
B、地址分配

C、CPU讀/寫(xiě)操作
讀寫(xiě)脈沖計(jì)數(shù)器:
脈沖計(jì)數(shù)器的值可以用命令直接寫(xiě),但要讀出時(shí),就必須先用鎖存脈沖計(jì)數(shù)器值命令,先鎖存起來(lái),再用命令直接讀;如下所示。
寫(xiě)脈沖計(jì)數(shù)器操作格式:
a、(*地址)= 數(shù)據(jù) ;
其中:地址=基地址+0+nn*16+mm; nn=(0~3)為通道號(hào),mm=(0~3)為字節(jié)地址;
數(shù)據(jù)為8位字節(jié)數(shù)據(jù)。
讀脈沖計(jì)數(shù)器操作格式:
a、(*鎖存地址)= 任意數(shù)據(jù);
b、變量=(*讀地址);
其中:鎖存地址=基地址+10+nn*16; nn=(0~3)為通道號(hào),10為鎖存脈沖計(jì)數(shù)器地址;
鎖存命令的數(shù)據(jù)為8位字節(jié)任意數(shù)據(jù),其值無(wú)意義。
讀地址=基地址+0+mm; mm=(0~3)為字節(jié)地址;
注意:脈沖計(jì)數(shù)器長(zhǎng)度為32位,允許全范圍設(shè)置:0x00000000~0xFFFFFFFF。實(shí)際輸出脈沖個(gè)數(shù)由下面公式給出:
脈沖個(gè)數(shù)=(脈沖計(jì)數(shù)器值+1)/2;
當(dāng)脈沖計(jì)數(shù)器值為最大值0xFFFFFFFF時(shí),允許最大脈沖個(gè)數(shù)為2,147,483,648。
當(dāng)脈沖計(jì)數(shù)器值為最小值0x00000001時(shí),允許最小脈沖個(gè)數(shù)為1。
其中,脈沖計(jì)數(shù)器值應(yīng)該為奇數(shù),如為偶數(shù),則最后一個(gè)脈沖寬度很窄。輸出脈沖為對(duì)應(yīng)頻率的方波。
寫(xiě)脈沖頻率數(shù)據(jù):
寫(xiě)脈沖頻率數(shù)據(jù)操作格式:
a、(*地址)= 數(shù)據(jù) ;
其中:地址=基地址+4+nn*16+mm; nn=(0~3)為通道號(hào),mm=(0~3)為字節(jié)地址;
數(shù)據(jù)為8位字節(jié)數(shù)據(jù)。
32位情況:脈沖頻率值長(zhǎng)度為32位,允許設(shè)置范圍為:0x00000001~0xFFFFFFFF。實(shí)際輸出脈沖頻率由下面公式給出:
當(dāng)脈沖頻率值0x00800000 時(shí):
脈沖頻率=(輸入時(shí)鐘頻率/228)*脈沖頻率值;
當(dāng)脈沖頻率值≥0x00800000 時(shí):
脈沖頻率=(輸入時(shí)鐘頻率/(236+228)*脈沖頻率值。
24位情況:脈沖頻率值長(zhǎng)度為24位,允許設(shè)置范圍為:0x000001~0xFFFFFF。實(shí)際輸出脈沖頻率由下面公式給出:
當(dāng)脈沖頻率值0x00400000 時(shí):
脈沖頻率=(輸入時(shí)鐘頻率/225)*脈沖頻率值;
當(dāng)脈沖頻率值≥0x00400000 時(shí):
脈沖頻率=(輸入時(shí)鐘頻率/(233+225)*脈沖頻率值。
啟動(dòng)脈沖通道工作:
啟動(dòng)脈沖通道工作操作格式:
a、(*地址)= 數(shù)據(jù) ;
其中:地址=基地址+8;
數(shù)據(jù)為8bit字節(jié),作為允許啟動(dòng)標(biāo)志,定義為:
D0----為1時(shí),允許通道1啟動(dòng),為0時(shí)不啟動(dòng);
D1----為1時(shí),允許通道2啟動(dòng),為0時(shí)不啟動(dòng);
D2----為1時(shí),允許通道3啟動(dòng),為0時(shí)不啟動(dòng);
D3----為1時(shí),允許通道4啟動(dòng),為0時(shí)不啟動(dòng)。
停止脈沖通道工作:
停止脈沖通道工作操作格式:
a、(*地址)= 數(shù)據(jù) ;
其中:地址=基地址+9;
數(shù)據(jù)為8bit字節(jié),作為允許停止標(biāo)志,定義為:
D0----為1時(shí),允許通道1停止,為0時(shí)不停止;
D1----為1時(shí),允許通道2停止,為0時(shí)不停止;
D2----為1時(shí),允許通道3停止,為0時(shí)不停止;
D3----為1時(shí),允許通道4停止,為0時(shí)不停止。
回讀數(shù)據(jù)鎖存:
CPU要讀相應(yīng)功能的數(shù)據(jù),就必須先鎖存其數(shù)據(jù),才能讀;否則,只能讀取上次鎖存的數(shù)據(jù)。共有下面三種功能數(shù)據(jù):
1. 脈沖計(jì)數(shù)器值:32bit;
2. 通用輸入口值:8bit;
3. 按鍵編碼值: 7bit;
CPU讀數(shù)據(jù)是按8 bit字節(jié)讀方式進(jìn)行的,32 bit脈沖計(jì)數(shù)器值需要讀4次,可按0~3任意順序讀取。8 bit值只能從地址0讀取。格式為:
a、(*鎖存地址)= 任意數(shù)據(jù);
b、變量=(*讀地址);
其中:鎖存地址和讀地址,可參見(jiàn)地址分配表3。
8/8位通用輸入/輸出口:
該芯片包含8位通用輸入口和8位通用輸出口。
8位通用輸入口讀命令為:
a、(*鎖存地址)=任意數(shù)據(jù);
b、變量=(*讀地址);
其中:鎖存地址=基地址+12;
讀地址=基地址+0;(所有讀地址相同)
8位通用輸出口寫(xiě)命令為:
a、(*寫(xiě)地址)= 數(shù)據(jù);
其中:寫(xiě)地址=基地址+11;
寫(xiě)數(shù)據(jù)為8位字節(jié)數(shù)據(jù)。
8x8鍵盤(pán)接口:
該芯片支持8X8矩陣鍵盤(pán),自動(dòng)掃描鍵盤(pán),識(shí)別按鍵鍵碼,CPU通過(guò)接口可讀取當(dāng)前按鍵編碼值。命令如下:
a、(*鎖存地址)=任意數(shù)據(jù);
b、變量=(*讀地址);
其中:鎖存地址=基地址+28;
讀地址=基地址+0;(所有讀地址相同)
按鍵編碼格式:

標(biāo)志位:為1表示有鍵正按下,為0表示沒(méi)有按鍵;
X:忽略;
回讀碼:取0~7為當(dāng)前按鍵所對(duì)應(yīng)的行(或列)編碼,特指輸入線(KBC_0~7);
掃描碼:取0~7為當(dāng)前按鍵所對(duì)應(yīng)的列(或行)編碼;特指輸出線(KBS_0~7);
七、編程示例
//A、地址常量定義:(設(shè)芯片基地址為0xe000)
#define MC_sys_CLK 32000000 //定義芯片工作頻率
#define MC_CNT_WR_Base_Addr (volatile unsigned char *) 0xe000 //定義計(jì)數(shù)器值寫(xiě)基地址
#define MC_CNT_Latch_WR_Base_Addr (volatile unsigned char *) 0xe00A //定義計(jì)數(shù)器鎖存寫(xiě)基地址
#define MC_FRQ_WR_Base_Addr (volatile unsigned char *) 0xe004 //定義頻率值寫(xiě)基地址
#define MC_Startup_WR_Base_Addr (volatile unsigned char *) 0xe008 //定義啟動(dòng)寫(xiě)基地址
#define MC_Stop_WR_Base_Addr (volatile unsigned char *) 0xe009 //定義停止寫(xiě)基地址
#define MC_GPOut_WR_Base_Addr (volatile unsigned char *) 0xe00B //定義通用輸出值寫(xiě)基地址
#define MC_GPIn_Latch_WR_Base_Addr (volatile unsigned char *) 0xe00C //定義通用輸入值鎖存寫(xiě)基地址
#define MC_KB_Latch_WR_Base_Addr (volatile unsigned char *) 0xe01C //定義鍵盤(pán)編碼值鎖存寫(xiě)基地址
#define MC_ RD_Base_Addr (volatile unsigned char *) 0xe000 //定義回讀值讀基地址
//B、子程序片:
//0、延遲子程序:芯片讀/寫(xiě)命令間要求有一定的定時(shí)間隔。
void delay(int n)
{ int i;
for( i = 0; i}
//1、寫(xiě)第n通道脈沖數(shù)值(必須為奇數(shù))
cnt = Np*2-1;
MC_CNT_WR_Base_Addr[n*16+0] = (char)((cnt>> 0) 0x0ff);delay(10);
MC_CNT_WR_Base_Addr[n*16+1] = (char)((cnt>> 8) 0x0ff); delay(10);
MC_CNT_WR_Base_Addr[n*16+2] = (char)((cnt>>16) 0x0ff); delay(10);
MC_CNT_WR_Base_Addr[n*16+3] = (char)((cnt>>24) 0x0ff);
//2、讀第n通道脈沖數(shù)值
MC_CNT_Latch_WR_Base_Addr [n*16+0] = (char)0; delay(10); //鎖存第n通道脈沖數(shù)值
Cnt = MC_ RD_Base_Addr [0]; delay(10); //回讀數(shù)據(jù)0字節(jié)
Cnt |= MC_ RD_Base_Addr [1]8; delay(10); //回讀數(shù)據(jù)1字節(jié)
Cnt |= MC_ RD_Base_Addr [2]16; delay(10); //回讀數(shù)據(jù)2字節(jié)
Cnt |= MC_ RD_Base_Addr [3]24; //回讀數(shù)據(jù)3字節(jié)
if( Cnt ==0xffffffff )
{ //第n通道脈沖輸出完處理
}
//3、寫(xiě)第n通道脈沖頻率值
Nfrq= frq_pulse*0x10000000/MC_sys_CLK; //注意整數(shù)運(yùn)算溢出問(wèn)題
MC_FRQ_WR_Base_Addr [n*16+0] = (char)((Nfrq>> 0) 0x0ff); delay(10);
MC_FRQ_WR_Base_Addr [n*16+1] = (char)((Nfrq>> 8) 0x0ff); delay(10);
MC_FRQ_WR_Base_Addr [n*16+2] = (char)((Nfrq>>16) 0x0ff); delay(10);
MC_FRQ_WR_Base_Addr [n*16+3] = (char)((Nfrq>>24) 0x0ff);
//4、啟動(dòng)多個(gè)通道脈沖工作
MC_Startup_WR_Base_Addr[0] = (F0 1) | ((F11)2) | ((F22)4 | ((F33)8) ;
//5、停止多個(gè)通道脈沖工作
MC_Stop_WR_Base_Addr[0] = (F0 1) | ((F11)2) | ((F22)4 | ((F33)8) ;
//6、8位通用輸出口輸出
MC_GPOut_WR_Base_Addr [0] = (char)(GPOut 0x0ff) ;
//7、8位通用輸入口輸入
MC_GPIn_Latch_WR_Base_Addr [0] = (char)0; delay(10); //鎖存通用輸入口值
GPIn_V = MC_ RD_Base_Addr [0] ;
//8、7位鍵盤(pán)按鍵編碼輸入
MC_KB_Latch_WR_Base_Addr [0] = (char)0; delay(10); //鎖存按鍵編碼值
KBCode = MC_ RD_Base_Addr [0] ;
if(KBCode 0x80)
{
//當(dāng)前有按鍵按下處理
}
八、基于SM1000的運(yùn)動(dòng)控制系統(tǒng)框圖
在圖2方案里,除了1-4軸運(yùn)動(dòng)控制本身之外,在板上根本不需要譯碼器、鎖存器之類(lèi)的芯片,按鍵掃描電路也節(jié)省了不少M(fèi)CU帶寬開(kāi)銷(xiāo),數(shù)字量通用輸出/輸入也增加了系統(tǒng)的控制方便性。
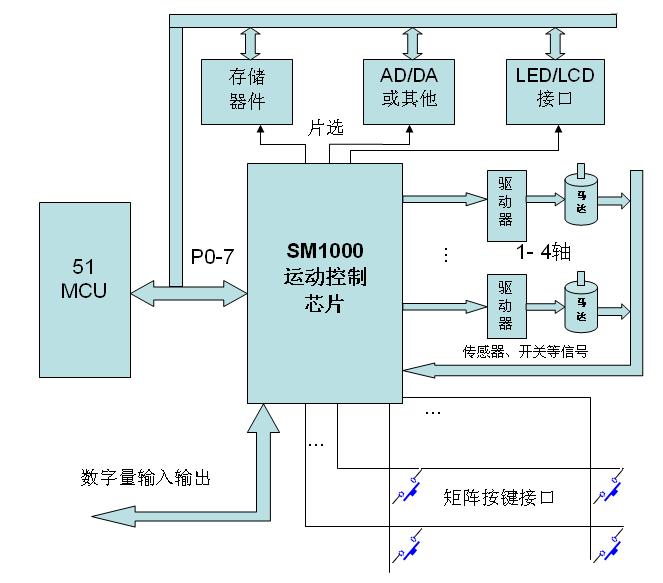
圖2. 基于SM1000的運(yùn)動(dòng)控制系統(tǒng)框圖









評(píng)論