風力擺控制實踐平臺設計

作者 吳振宇 李勝銘 高元龍 李超 殷殷 大連理工大學 創新創業學院(遼寧 大連 116024)
本文引用地址:http://www.104case.com/article/201703/345946.htm吳振宇(1971-),男,博士,副教授,研究方向:嵌入式系統、智能控制、機器人等領域。
摘要:本文主要講述利用Coretx-M4單片機控制風力擺運動軌跡的實現方法。系統根據當前加速度、角速度及圖像信息,利用閉環控制算法調節電機,實現風力擺直線擺動、圓周擺動及定點靜止等功能。系統響應速度快,控制精度高,交互操作界面簡單易用,具有良好的交互性。
引言
風力擺系統的擺體由風扇構成,通過調整風扇的轉速實現擺動位置及擺動路線的控制,由于擺動機構的滯后性,實現精確控制具有一定難度。通過合理的擺結構設計,并利用擺線理論建模,設計并優化控制策略,利用閉環結構提升擺的軌跡運動準確性。系統對風擺控制參數設定、抗擾因素測試等慣性滯后問題解決具有借鑒意義,同時也為分析該類問題建立了直觀的測試平臺。
1 系統結構
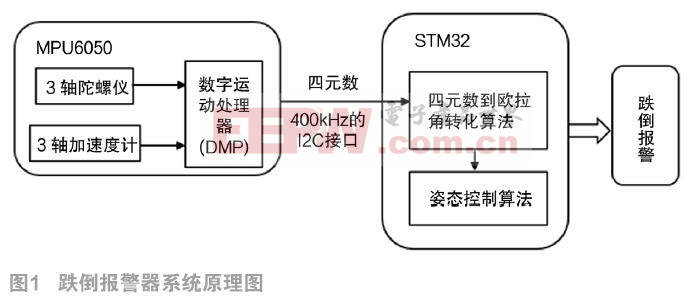
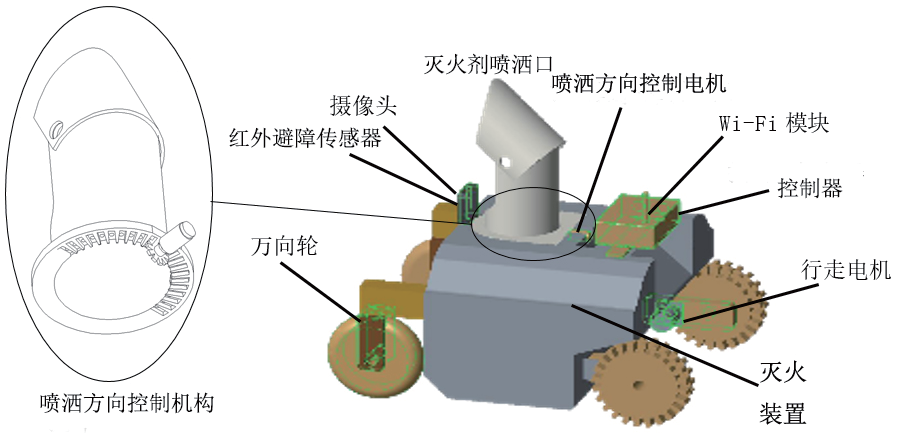
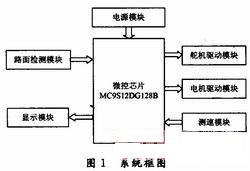
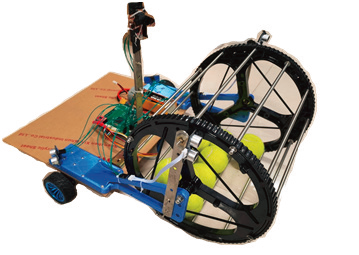
本系統硬件部分主要由電源模塊、MCU模塊、姿態采集模塊、電機驅動模塊、風力擺機械部分等組成。機械部分為萬向節懸掛65cm硬質桿,底端連接4個風機構成風機組,中心固定姿態采集模塊。MCU使用I2C協議采集姿態模塊的數據,MCU根據設定值利用PID控制理論,通過控制PWM占空比來控制 4個風機的轉速和方向,實現對風力擺的控制,整體系統結構如圖1所示。

1.1 電源模塊
7.2V /2000mAh鎳鎘電池為MCU模塊、傳感器模塊和顯示模塊供電。
學生電源輸出6V穩壓,為四路電機驅動供電。
1.2 MCU模塊
MCU模塊是核心部分,負責數據處理。有以下功能:
負責讀取風擺角度數據,將加速度、角速度信息進行互補濾波和四元數轉化,計算當前風力擺角度信息;
負責讀取攝像頭圖像信息,對數據進行去噪點化處理后提取標志物邊緣,計算得出標志物中心點位置;
負責控制電機驅動模塊,利用PID閉環控制算法調節電機轉速和方向,實現對風力擺運動軌跡的控制。
1.3 姿態采集模塊
姿態采集模塊是整個控制系統的關鍵組成部分,本系統采用整合性六軸陀螺儀加速度計芯片,負責檢測風力擺的加速度角速度信息[1]。
1.4 電機驅動模塊
電機驅動模塊為雙BTN7960組成的H橋電機驅動,根據MCU控制器輸出的PWM信號和方向信息,控制空心杯電機的轉速和方向。
1.5 攝像頭模塊
攝像頭模塊是系統的特殊功能部分,為實現擺頭跟隨目標物而設計。攝像頭采集圖像,并對目標物進行識別,進而實現對目標物的跟隨。
2 系統理論分析與計算
2.1 風力擺狀態的測量與計算
采用高精度的加速計和陀螺儀MPU6050,不斷采集風力擺姿態數據。MPU6050對陀螺儀和加速度計分別用了三個16位的ADC,將其測量的模擬量轉化為可輸出的數字量,通過DMP處理器讀取測量數據,然后通過I2C總線輸出,得到風擺的姿態角度。
2.2 風力擺控制分析
風力擺通過4只空心杯電機提供驅動推力,姿態采集模塊采集風力擺當前姿態角,單片機處理姿態角,調節4個電機PWM的比例,從而控制下一時刻風機工作狀態,實現對于風力擺的控制[3]。

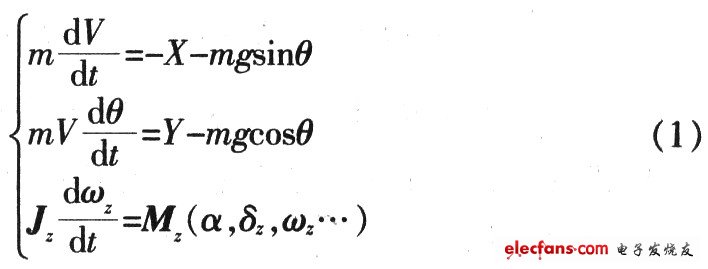
在自由單擺模型中,單擺做簡諧運動的周期跟擺長的平方根成正比,跟重力加速度的平方根成反比,跟振幅、擺球的質量無關[6]。
 (1)
(1)
風擺擺長確定后,周期也就確定,如圖2所示,根據自由單擺簡諧運動的特性,利用三角函數關系[4~5],風擺跟隨自然周期做出單擺的運動,加上X、Y方向,兩個方向運動相位差90度,如圖3所示,風擺就能做出圓周運動。

在處理風力擺模型時,可認為是控制每一時刻風力擺的姿態角,從而控制類自由擺運動和圓周運動。當物體離開垂直的平衡位置之后,便會受到重力與懸線的作用合力,驅動重物回復平衡位置。這個力稱之為回復力,公式為。
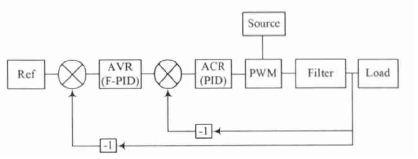
2.3 控制算法的分析
本系統采用PID算法來控制風機轉動的速度[2]。風機開始工作后,姿態采集模塊不斷采集當前風力擺姿態角狀態,并與之前的狀態比較,使得風力擺的運動狀態逐漸趨向于平穩。PID算法控制器由角度比例P、角度誤差積分I和角度微分D組成。
其輸入e(t)與輸出U(t)的關系為:
 (2)
(2)
它的傳遞函數為:
 (3)
(3)
3 電路與程序設計
3.1 電路設計
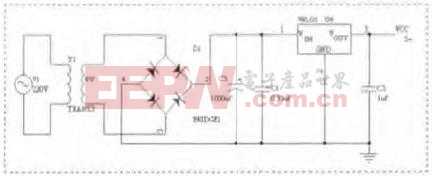
3.1.1 電源
7.2V蓄電池電源經LT1529-5穩壓得到5V電源,再經過兩片LT1085電源芯片穩壓得到兩路3.3V電源,一路單獨供電MCU,一路供電其它外設。主控板電源原理如圖4所示。







評論