基于四旋翼飛行器對地面移動信標自主探測和跟蹤系統的研究與實現

作者 王博1 錢家琛2 邱城偉1 肖建1 1.南京郵電大學 電子與光學工程學院(江蘇 南京 210046) 2.南京郵電大學 微電子學院(江蘇 南京 210046)
本文引用地址:http://www.104case.com/article/201807/389573.htm摘要:介紹了一種基于四旋翼飛行器快速、穩定探測和跟綜地面上有色信標的系統。該系統由三部分組成:具有探測和跟蹤功能的四旋翼飛行器、可遙控移動的有色信標小車和遙控終端(地面站)。四旋翼飛行器、可遙控移動的有色信標小車和遙控終端均采用Cortex-M3內核處理器。四旋翼飛行器能準確探測到地面上的有色信標位置,并在信標靜止的情況下能快速穩定懸停在信標的正上方。在遙控終端控制有色信標小車任意方向移動,四旋翼飛行器能快速跟蹤信標的移動。當四旋翼飛行器在有色信標小車上方一定距離和范圍內時,四旋翼飛行器和小車同時發出聲光報警。
* 2017年“瑞薩杯”全國大學生電子設計競賽本科組最高獎“瑞薩杯獎”
王博(1995-),男,碩士生,研究方向:集成電路與嵌入式。
0 引言
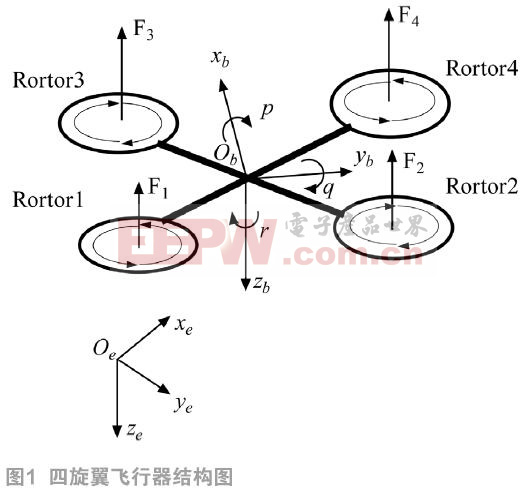
四旋翼飛行器具有體積小、重量輕、易組裝、靈活度高、隱藏性好等特點,適用多種空間場所,可以在任何小平臺上靈活起降。它方便攜帶,低空飛行性好,能執行各種不適合人體環境的特種任務,可在復雜環境下如洞穴隧道等幽閉場所快速執行偵察、勘察任務。
基于四旋翼飛行器的地面移動信標自主探測和跟蹤系統能有效快速、穩定地對地面目標實時跟蹤,因此在軍事偵察、交通監控、抗災救援、民用領域等都有著廣闊的應用前景。該技術得到很多專家們的高度關注,成為當前該領域下最活躍的研究方向之一。
1 系統整體方案
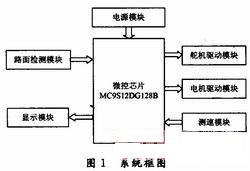
系統整體功能框圖如圖1所示。本系統旨在設計并制作一架能穩定飛行的四旋翼飛行器,且具有目標物體探測識別、自動定位、自主跟蹤地面上運動的信標小車等功能。該系統由三部分組成:具有探測和跟蹤功能的四旋翼飛行器、可遙控移動的有色信標小車和遙控終端(地面站)。四旋翼飛行器借助pixhawk飛控平臺,負責飛行姿態檢測;飛行控制以兩塊瑞薩RX23T單片機為核心,由openMV圖像識別模塊、超聲波測距模塊、聲光報警模塊等幾部分構成,飛行過程中,經過瑞薩芯片處理各外設采集的包括飛行器高度、色塊位置、小車位置等數據,結合PID控制算法給出飛行器的飛行決策,同時解算出相應通道值(pitch、yaw、roll和throttle等),通過ppm信號控制飛控板及時來調整電機轉速值,使飛行器穩定在指定高度,調整飛行姿態,使飛行器及時到達相應的位置,從而對地面信標實現探測和跟蹤等功能。遙控終端(地面站)控制信標小車的移動并實時反饋顯示系統狀態信息。

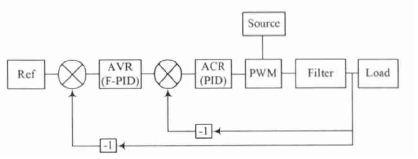
2 四旋翼飛行器控制與導航
四旋翼飛行器控制部分機構框圖如圖2所示。四旋翼飛行器借助Pixhawk平臺以及兩塊瑞薩開發板RX23T協同控制;一塊RX23T作飛行控制,另一塊RX23T作信息處理。兩塊RX23T之間通過I2C進行通信,作飛行控制的RX23T與Pixhawk通過Mavlink進行通信。圖像數據借助openMV實現采集;高度信息借助超聲波模塊實現采集。高度信息和圖像信息在信息處理板中進行數 據融合后,經I2C傳輸給飛行控制板和經無線數傳模塊傳給小車遙控器(地面站),飛行控制板結合Pixhawk回傳的飛行器當前姿態等信息給出正確的飛行決策,并將此次的飛行決策寫入PPM編碼中傳給Pixhawk。小車遙控器將接收到的的融合數據重新解碼,并在串口屏上顯示出來供用戶查看飛行器當前的運動信息。

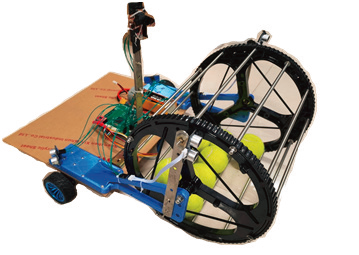
3 有色信標小車制作
在本次系統中移動的信標用遙控小車來模擬。為讓信標小車能被四旋翼飛行器唯一探測和跟蹤到,在小車頂部用紅色布片作為信標特征以便攝像頭識別。

信標小車為四輪機械小車,核心控制板采用的是TI公司的TM4C123G開發板;采用工作電壓為12 V、帶有霍爾編碼器、減速比為30:1的直流有刷電機,通過L298N驅動。信標小車將接收到的控制信號解碼后換算為小車左右兩邊電機的轉速值,并借助霍爾編碼器對其轉速進行的PID調控,精確快速的控制小車移動。

4 小型遙控器(地面站)的制作
遙控器終端(地面站)采用TI公司的TM4C123G芯片作為處理器。遙控器的主要功能是控制信標小車的移動和人性化展示系統的狀態信息——飛行器當前的運動姿態及檢測到的信標位置坐標值和信標小車的運動狀態。
遙控器終端的結構框圖如圖3所示。左遙桿負責控制小車的油門,即控制小車的前行速度的快慢;右搖桿負責小車的方向,即控制小車的左右移動的快慢。遙桿輸出的模擬量通過ADC采樣后輸入給單片機,單片機將其轉換成控制電機轉速的PWM信號并通過無線數據傳輸給信標小車。顯示屏上有人性化的信息界面和控制面板,當地面上有多個信標存在時,可通過顯示屏上的控制面板選擇飛行器探測和跟蹤指定的信標。


5 信標的快速定位和追蹤
本系統的難點之一在于如何實現四旋翼飛行器對信標的快速探測和動態跟蹤。對此,提出一種新型的pid控制方法——將攝像頭視野中信標小車的周圍區域劃分為內外兩個“環”,外環區域內飛行器的運動具有大的比例(P)控制和小的微分(D)控制,內環區域內飛行器的運動具有小的比例(P)控制和大的微分(D)控制。簡單來講,就是“外環大P小D,內環大D小P”,探測和跟蹤的運動控制PID圖解如圖4所示。為求解飛行器對信標小車的相對位置,我們在攝像頭視野中建立如圖5所示的虛擬坐標圖。攝像頭置于飛行器底部,所以攝像頭視野中心點M坐標為(x0,y0)可看成飛行器在地面上的投影位置,通過簡單的視覺處理,可算出信標在坐標圖中的位置(x1,y1), x1- x0和y1- y0就是飛行器與信標的相對坐標差——飛行器探測和跟蹤控制PID的重要輸入參數。當M點在“外環”時,根據前述的控制算法,飛行器會快速調整運動狀態向信標移動;當M點位于“內環”之中時,飛行器的運動相對緩和,最終穩定懸停在信標的正上方,實現對信標的快速探測和穩定跟蹤。
參考文獻:
[1]PrateekJoshi.OpenCV實例精解[M].北京:機械工業出版社,2016 .
[2]高偉.捷聯慣性導航系統初始對準技術[M].北京:國防工業出版社,2014
[3]Tiva? C Series TM4C123GH6PM Microcontroller Data Sheet,2014
[4]瑞薩RX23T芯片參數[M/CD],2017
本文來源于《電子產品世界》2018年第8期第33頁,歡迎您寫論文時引用,并注明出處。






評論