汽車主動懸架的單神經元自適應控制

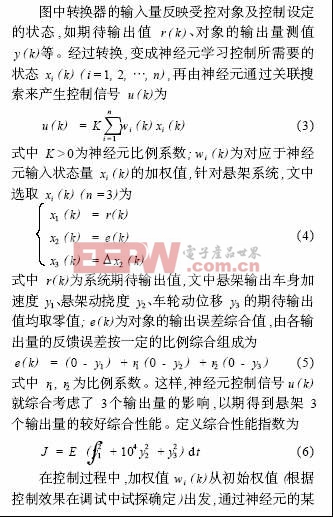
選取系統狀態變量X、輸入變量U和輸出變量Y分別為本文引用地址:http://www.104case.com/article/197811.htm


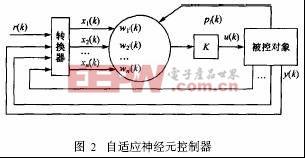
三、自適應神經元控制器的設計
文獻[6>提出了一種適于控制的自適應單神經元模型,它既可以利用神經網絡的優點,又能適應于快速過程實時控制的要求。其相應的自適應神經元控制系統如圖2所示。

四、仿真計算及分析
根據以上自適應神經元控制算法,利用Matlab615中的Simulink510工具箱,通過搭建系統模塊來實現模擬仿真,所得自適應神經元控制器的Simulink仿真模型見圖3。為證實其減振效果,還與被動懸架、傳統的PID控制懸架進行了性能對比。










評論