基于虛擬儀器的同步伺服系統PID模糊控制器設計

(3)同步控制
雖然已經建立了初步的模型,并采用模糊PID進行調節,但為了進一步提高伺服系統的同步性,將兩者的位置或速度差,乘以適當的系數,形成一個微小值。對速度快者降低電壓設定值,對速度慢者提高電壓設定值,實現對兩臺電機的同步控制。由于在轉速較低的情況下,電機對對電壓信號更為敏感,因而此時系數可以設置的較小,高速時系數可以設置的較大,但兩種情況下均不能設的很大,否則會導致電機不穩定。
3.實驗結果
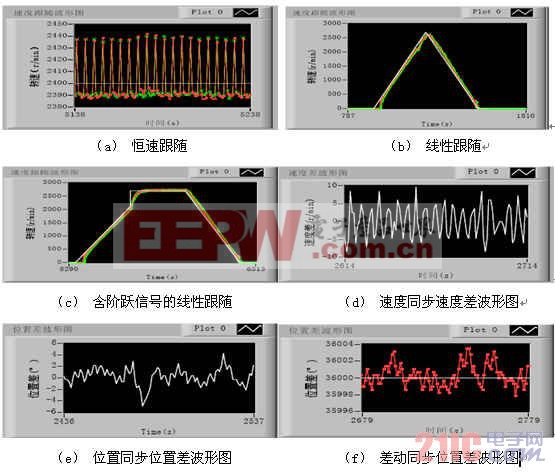
本同步伺服系統共完成了速度跟隨、速度同步、位置同步、差動同步四種實驗,其中速度跟隨包括恒速跟隨、線性跟隨、含階躍信號的線性跟隨三種。以下圖3中a、 b、c中白色直線表示設定值,紅色●表示甲電機的實驗結果綠色×表示乙電機的實驗結果; d、e中白色直線表示實際差值;f中白色直線表示設定值,紅色● 表示實際差值。
本文引用地址:http://www.104case.com/article/194942.htm
4.實驗數據處理及分析
(1)對于輸入的數字信號,伺服系統能實現如圖3中a、b、c所示波形的實時速度跟隨。
(2)能夠實現兩臺電機的實時速度同步運行,閉環控制,如圖3中d所示絕對誤差不累積,相對轉速差不累積且可以控制在10r/min以內。
(3)能實現兩臺電機的實時位置同步運行,閉環控制,如圖3中e所示絕對誤差不累積,相對角度差不累積且可以控制在±6°以內。
(4)能夠實現單臺電機預先轉動給定角度后,另一臺電機才開始轉動,然后兩臺電機保持該恒定相位差同步運行,如圖3中f所示,誤差控制在±4°。
5.結論
利用本文提及的分段線性法、模糊PID控制理論、以及同步控制法相結合設計的控制器可以實現同步伺服系統的控制要求。利用這些方法和理論可以繼續向速度更低或更高的階段發展,因而即便在更寬的速度范圍內也能實現對雙電機的同步控制。另外由于本文中控制器的算法較為復雜、程序量較大且都是在操作系統(準確度只能達到毫秒級)的平臺上運行,僅執行周期就接近10毫秒,因而我們的調節頻率較低為20Hz,如果能設法提高調節頻率,相信控制效果會有更進一步的改善。

伺服電機相關文章:伺服電機工作原理






評論