基于虛擬儀器的同步伺服系統PID模糊控制器設計

1.引言
顫振試飛歷來是飛機試飛最后關注的課題,因為它直接影響飛行安全。在顫振試飛實驗中,顫振激勵系統是顫振試飛的重要設備之一。
直流伺服系統作為驅動單元,是顫振激勵及分析系統研制中技術難度和風險較大的一環,涉及到同步控制、小型特種永磁無刷直流伺服電機技術等一系列問題。本文以LabVIEW 7軟件為開發平臺,運用LabVIEW 強大的數據采集功能及其PID和Fuzzy logic兩個工具箱為該伺服系統設計一個基于虛擬儀器的控制器,完成雙電機的同步控制。
2 基于虛擬儀器同步伺服系統控制器的設計
2.1 同步伺服系統的組成
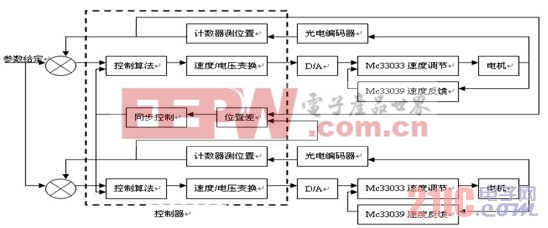
位置——速度雙閉環直流伺服系統原理框圖
整個顫振激勵器的直流伺服系統原理框圖如圖1。該直流伺服系統主要實現雙電機的同步控制,包括實時位置同步、速度同步、差動同步以及速度跟隨等功能,采用雙閉環控制。外環是位置閉環,利用NI公司的數據采集卡PCI6221的計數器與光電編碼器相結合檢測電機轉子的位置,引入位置閉環既可以較方便的采用先進控制算法又可以將位置差通過同步控制算法形成控制信號以確保同步精度;內環是速度閉環,通過Mc33039芯片檢測轉子速度,引入速度閉環來提高直流伺服系統的響應速度,同時可以大大削弱系統參數變化的不利影響,抑制摩擦和間隙等非線性的不良作用,具有較高的抗干擾性能。
2.2 控制器的設計
2.2.1總體設計
控制器作為伺服系統的核心,將來自各傳感器的檢測信息和外部輸入命令進行集中、分析和加工,按照一定的程序給出相應的指令,從而控制整個系統有條不紊地運行,因而無疑對整個系統性能的優劣起著非常重要的作用。
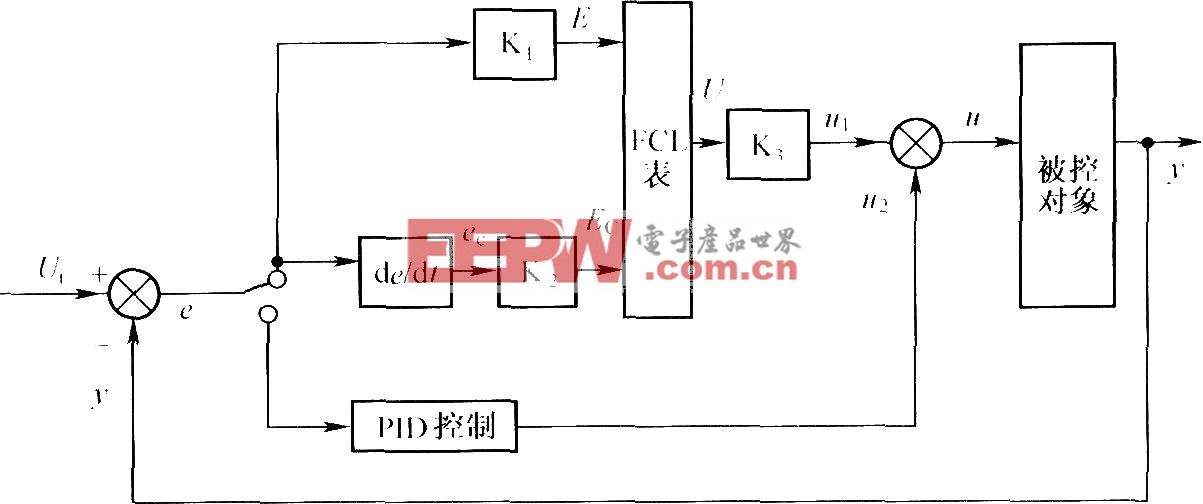
PID控制算法是一種工業控制中廣泛應用的控制策略,傳統的PID控制器具有原理簡單,設計簡便,易于調整,穩態性能好等優點,對具有線性、有確定模型的系統易于整定到最佳控制效果。但本文的顫振激勵系統的同步伺服系統是兩臺無刷直流電機,均為PWM調速,速度大小與調速電壓之間的關系顯然是非線性的。為此,首先在不同的調速電壓下做大量的試驗,來測定轉速,然后通過調速電壓、速度數據建立一個基本的數學模型;其次將兩路位置信號的差值形成的控制信號送入控制算法;最后在傳統PID控制器的基礎上應用模糊集合理論,設計一個基于簡單模型的模糊PID控制器,能方便的實現參數的在線自整定,以達到較為理想的控制效果。
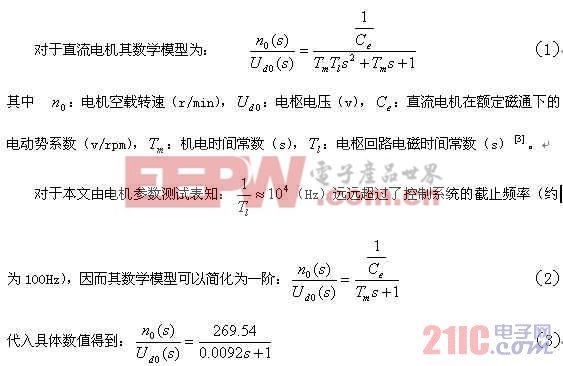
2.2.2電機的數學模型

相關推薦
-
-
jackwang | 2006-09-17
-

-

-

-
-
-
-
jackwang | 2006-09-17
-

-
-

-

-
-
informationspy | 2007-08-05
-
-
-
-
黃品冠 | 2007-09-18
-
評論