基于虛擬儀器的同步伺服系統PID模糊控制器設計

2.2.3同步算法實現
( 1)速度電壓關系分段線性化
本同步伺服系統甲、乙兩臺電機均為無刷直流電機,設計參數基本一致,電機供電電壓為直流15伏,采用PWM調速方式。在正常供電情況下,PWM端輸入電壓信號大于1.4伏,電機開始轉動,隨著調速電壓信號的加大,電機轉速開始加快,但是很明顯轉速和調速電壓之間不是線性關系。為此首先測定轉速和調速電壓之間的關系,然后將其分段線性化,使電機轉速在較窄的范圍內和調速電壓建立近似線性關系,根據實驗數據對于甲、乙兩組電機分別算出在轉速(r/s)不同的情況,調速電壓(V)與轉速之間的近似線性關系如下:
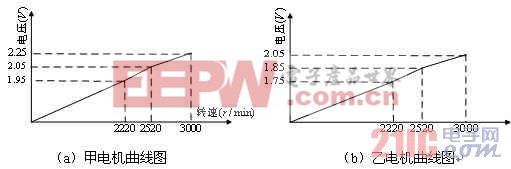
利用這組近似關系,可以確定在固定轉速情況下甲、乙兩臺電機的電壓設定值,然后利用數據采集卡PCI6221的計數器,通過LabVIEW編程采集光電編碼器脈沖個數(電機每轉產生1024個方波脈沖),可以算出此時電機的確切轉速,將此轉速通過上述近似關系式可以求得對應的實際調速電壓值,最后將設定電壓值與實際電壓值之差進行PID調節。由于電機轉速在不同的階段所對應的比例增益系數、積分增益系數不相同,在同一個轉速階段的上升階段與平穩階段所對應的比例增益系數、積分增益系數也不相同。為了達到理想的控制效果,首先利用電機模型及仿真實驗結果,以初步確定比例增益系數、積分增益系數;其次通過實驗對比例增益系數、積分增益不斷進行調整以確定不同階段的相對應的最為合適的比例增益系數、積分增益系數;最后利用模糊集合理論,建立一個模糊規則庫,實現參數的自整定。
(2)建立模糊PID控制器
在 LabVIEW前面板或控制面板的tools菜單下面打開 fuzzy logic controller design子選項就可以方便的設計和修改模糊控制器的隸屬函數、規則庫、推理規則等。設計的結果保存在一個以.fc結尾的文件中,以備在應用程序中調用。Control下面的 Fuzzy controller子程序用于在程序中實現模糊控制算法。Control下面的Load fuzzy controller將.fc結尾的文件調入應用程序并將指定文件的PID參數加載到應用程序的模糊控制器中。三者緊密相連環環相扣,能方便直觀的完成模糊控制器的設計、編輯、加載。

伺服電機相關文章:伺服電機工作原理
相關推薦
-
-
jackwang | 2006-09-17
-
-

-

-

-
-
informationspy | 2007-08-05
-

-
-
-
-
黃品冠 | 2007-09-18
-

-
jackwang | 2006-09-17
-
-
-
-

-
評論