智能車電磁檢測及控制算法的研究

3.1 基于模糊控制的變參數(shù)PD控制器
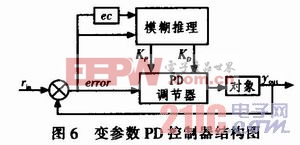
基于模糊控制的PID參數(shù)整定就是將模糊理論應(yīng)用到PID 3個參數(shù)的整定中,將模糊理論與PID控制結(jié)合起來,構(gòu)成一個模糊PID控制器。本設(shè)計去掉了PID中的積分環(huán)節(jié),采用基于模糊控制的變參數(shù)PD控制器。因積分環(huán)節(jié)主要是用于消除靜態(tài)誤差,相對于干擾較大舵機控制來說,它的作用并不明顯,反而會降低響應(yīng)速度。變參數(shù)PD控制器的結(jié)構(gòu)如圖6所示。圖中:rin為系統(tǒng)的輸入;yout為系統(tǒng)的輸出;error為系統(tǒng)輸入與輸出的差;ec為誤差的變化率。本文引用地址:http://www.104case.com/article/179065.htm
為了實現(xiàn)變參數(shù)PD控制,算法引入了兩個新的變量:偏移角度的變化率△α和偏移距離的變化率△d。
3.2 模糊控制規(guī)則及參數(shù)的整定
在模糊控制中取誤差α(或d)和誤差變化率△α(或△d)為輸入語言變量,以構(gòu)成一個二維模糊控制器,每個語言變量取負大(NB)、負中(NM)、負小(NS)、零(Z)、正小(PS)、正中(PM)、正大(PB)七個語言值。根據(jù)各模糊子集的隸屬度賦值表和各參數(shù)模糊控制模型,建立轉(zhuǎn)向模糊規(guī)則表。
參數(shù)的調(diào)整就是尋求Kp、KD與△α、△d之間的關(guān)系。智能車在運行中不斷檢測α、d和△α、△d,然后查詢模糊規(guī)則表選擇合適的Kp、KD參數(shù)進行控制。實際控制中,當△α,△d增大時,表明車體有偏離導(dǎo)線的趨向,這時候增加Kp、KD,阻止車體的繼續(xù)偏離;當△α,△d減小時,表明車體正逐漸趨近于導(dǎo)線,這時候就要減小Kp、KD。
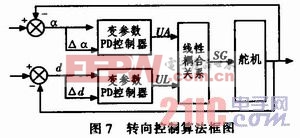
設(shè)計中,系統(tǒng)首先采用基于模糊控制的變參數(shù)PD控制器分別實現(xiàn)單個輸入量下的控制量輸出,然后實驗得出的線性耦合關(guān)系將兩個輸出量耦合為一個量控制舵機。
圖7所示為轉(zhuǎn)向控制算法框圖。UA為純偏移角度控制時舵機的給定量,UL為純偏離距離控制時舵機的給定量,SG為最終的舵機給定量。通過實驗得到的耦合關(guān)系為:SG=0.6UA+0.4UL。這時的舵機響應(yīng)速度快,直道的跟蹤效果很好,通過彎道時可以看到比較明顯的內(nèi)切。
4 速度控制算法的設(shè)計
智能車要完成起動、加速、減速、制動等動作。直線行走、拐彎和停車時要求不同的車速,因此速度必須采用閉環(huán)控制。智能車的速度與轉(zhuǎn)向是兩個獨立的被控量,但它們都是根據(jù)偏移角度α及偏離距離d來確定輸出給定量的。
根據(jù)智能車速度控制的特點,設(shè)計采用了變結(jié)構(gòu)控制方法。變結(jié)構(gòu)系統(tǒng)是指在控制過程(活瞬態(tài)過程)中,系統(tǒng)結(jié)構(gòu)(或叫模型)可發(fā)生變化的系統(tǒng)。變結(jié)構(gòu)控制對加給系統(tǒng)的攝動和干擾有良好的白適應(yīng)性。對于車速的控制,當偏差較小時,采用PID控制,提高穩(wěn)態(tài)精度;當偏差較大時,采用PD控制,以便加快響應(yīng)速度;當偏差大于可調(diào)節(jié)范圍時,采用Bang-Bang控制。圖8所示為速度控制算法框圖。
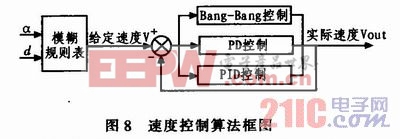
不同的偏移角α及偏離距離d通過查詢速度模糊規(guī)則表得到給定速度等級V。系統(tǒng)實時檢測電機的實際速度值,同當前的設(shè)定值做比較,根據(jù)誤差范圍的不同分別采用PID控制、PD控制和Bang-Bang控制。當速度誤差在±5%時采用PID控制;當速度誤差在±5%~±10%時采用PD控制;當速度誤差大于±10%時采用Bang-Bang控制。
5 結(jié)論
基于電磁傳感器的智能車的設(shè)計,可以檢測出車模相對于導(dǎo)線的偏移角度α及偏離距離d,并以此作為控制的輸入量。通過變參數(shù)的PD控制和變結(jié)構(gòu)控制分別實現(xiàn)舵機和電機的精確控制。整體調(diào)試后車模速度由傳統(tǒng)控制方法下的1.8 m/s提高到目前的2.3 m/s,轉(zhuǎn)彎處可以看到比較明顯的內(nèi)切。實驗結(jié)果表明,這種控制方法相對于單一的PID控制具有響應(yīng)時間快,穩(wěn)態(tài)性能好,抗干擾能力強的特點。







評論